Sa post na ito sinisiyasat namin kung ano ang isang BLDC motor at pagkatapos ay natutunan namin ang tungkol sa disenyo ng isang walang sensor na BLDC motor driver circuit.
Mga Tagahanga ng BLDC CPU
Nakita ang mga mabilis na gumagalaw na tagahanga sa mga CPU, boltahe pampatatag, DVD player, at iba pang katulad na kagamitan, na gumagana nang may lubos na kahusayan, pag-ubos ng pinakamaliit na puwang, kasalukuyang at nagagawa pa ring maihatid ang mga mahahalagang operasyon tulad ng nakasaad para sa partikular na kagamitan?
Oo, ito ang lahat ng mga modernong bersyon ng mga tagahanga ng BLDC o ang mga brushless DC motor na higit na nakahihigit kaysa sa dating tradisyunal na brushing motor.

Kagandahang-loob ng Larawan: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Gayunpaman ang isang motor na BLDC ay mangangailangan ng isang sopistikadong circuit ng driver, at oo ang lahat ng mga tagahanga ng CPU na ito ay naglalaman ng mga built-in na module ng driver na ito, kahit na ang mga ito ay lilitaw na madaling mapatakbo gamit ang isang ordinaryong DC, sa panloob ang sistema ay nilagyan na ng isang smart circuit.
BLDC Motor Driver
Malalaman dito ang tungkol sa isang matalinong circuit ng driver ng motor na BLDC, na gumagamit ng isang solong chip DRV10963 para sa pagmamaneho ng anumang maliit na motor na BLDC na may hindi kapani-paniwalang kahusayan, at kalaunan sa isa sa mga paparating na artikulo ay makikita natin kung paano maaaring ma-upgrade ang IC circuit na ito para sa pagmamaneho kahit ang malakas na mataas na kasalukuyang mga BLDC tulad ng mga alin ginamit sa quadcopters.
Ngunit bago ito magiging kawili-wili upang malaman nang kaunti tungkol sa mga BLDC motor.
Pagkakaiba sa Pagitan ng Brush at Brushless DC Motors
Ang pagkakaiba sa pagitan ng isang brush motor at isang brushless motor at ang rate ng kahusayan ay halata.
Dahil ang brushing motor ay may armature ng sugat mismo na gumagalaw sa pagitan ng mga magnet, kailangang gumamit ng 'brushes' (paghuhugas ng mga contact) upang ang mga gumagalaw na terminal ng coil ay makakatanggap ng tuloy-tuloy na boltahe ng suplay nang hindi kinakailangang maabot ang mapagkukunan ng supply, na kung saan ay maaaring gawin ang nagtatrabaho imposible at mapanganib ang mga operasyon.
Sa isang walang motor na motor, ang likaw o ang paikot-ikot ay hindi kailanman gumagalaw at pare-pareho, narito ang rotor ay nagdadala ng isang hanay ng mga permanenteng magnet at umiikot sa impluwensya ng nakapalibot na mga magnetic fluks.
Dahil ang pang-akit ay libre mula sa lahat ng mga abala, at makakapagtrabaho nang hindi kasangkot ang mga terminal upang pamahalaan o makatanggap ng lakas, maaari itong magpatakbo ng walang kahirap-hirap, umiikot sa isang mabilis na bilis at halos sa walang ingay na antas.
Ngunit may isang catch dito. Upang makagawa ng isang electromagnet na tumugon sa mga permanenteng pagkilos ng bagay na pang-akit, kailangang magkaroon ng isang pare-pareho na paglipat ng magnetic phase o mga poste, upang ang dalawang katapat ay patuloy na makapag-reaksyon at dumaan sa isang laban na puwersa sa gayong paglabas ng kinakailangang puwersa ng pagkagulo sa rotor at isagawa ang pag-ikot gamit ang nagresultang metalikang kuwintas.
Sa isang brushing motor, nagiging madali ito dahil sa pag-aayos ng kalikasan ng armature coil na kung saan ay nakakaikot at lumikha ng isang sarili na nagpapatuloy sa salungat na magnetikong puwersa at patuloy na umiikot nang hindi nangangailangan ng anumang panlabas na pulso o pagproseso.
Gayunpaman sa isang BLDC ito ay nagiging isang problema dahil ang magnet rotor ay mananatiling 'clueless' at nangangailangan ng isang kinakalkula na magnetikong utos mula sa paikot-ikot upang paikutin sa isang makabuluhang paraan at hindi sa isang masamang paraan.
Iyon mismo ang dahilan kung bakit ang lahat ng mga BLDC motor na mandatorily ay nangangailangan ng isang circuit ng driver ng motor para sa utos ng tatlong magkakaibang mga hanay ng paikot-ikot sa loob ng motor.
Sa gayon ang lahat ng BLDC ay mahalagang 3-phase na mga motor at sapilitan na nangangailangan ng 3 mga yugto para sa paggawa ng paikot na metalikang kuwintas sa rotor.
Ano ang Ginagawa ng Sensorless BLDC Drivers
Ang sensor ng mas kaunting BLDC driver circuit ay kinukuryente lamang ang 3 mga hanay ng paikot-ikot sa isang sunud-sunod na paraan na ang magnetikong rotor ay maaaring dumaan sa isang pare-pareho na salungat na puwersa na nagbibigay-daan sa motor na makamit ang isang napapanatili na metalikang kuwintas at paikot na puwersa.
Ngunit ang sunud-sunod na pag-powering ng BLDC na paikot-ikot ng circuit ay hindi maaaring i-set nang sapalaran, dapat na ito ay magkasabay o bilang tugon sa paikot na posisyon ng rotor magnet, kung hindi man ang pagpapatupad ay maaaring maging haywire at maaari nating masaksihan ang shaft ng motor (rotor ) umiikot nang walang tigil, iyon ay tumatakbo sa pagitan ng isang pakanan at isang anticlockwise na walang makatuwirang pag-ikot.
Bakit Ginagamit ang Mga Sensor sa BLDC Motors
Samakatuwid, ipinakilala namin ang mga sensor na nakaposisyon sa loob ng maraming mga variant ng motor ng BLDC, ang mga sensor na ito (karaniwang mga sensor ng Hall effect) na 'nauunawaan' ang pagbabago ng posisyon ng mga magnetikong poste ng pang-akit na rotor, inatasan ang nakakabit na circuit ng processor upang makuryente ang kaukulang paikot-ikot at magpatupad ng isang rotational na kilusan na may pinakamainam na metalikang kuwintas.
Ang mga sensor ng epekto ng hall ay mabisang nagtatrabaho sa karamihan ng mga motor na BLDC na medyo malaki ang sukat, ngunit para sa mas maliit na motor tulad ng mga tagahanga ng CPU, CPU drive, manlalaro ng DVD, sa mga maliliit na tagahanga ng tambutso, para sa mga motor na ginamit sa mga quadcopter, ang mga sensor ng epekto ng hall ay maaaring maging hindi naaangkop at samakatuwid ang isang alternatibong sensor na mas kaunting diskarte ay ipinatupad.
Nagsasangkot ito ng pagsasamantala sa likas na likod ng EMF na paikot-ikot na kuryente na kinuha bilang sanggunian para sa pagproseso at pagkuryente sa mga nauugnay na hanay ng paikot-ikot at pagpapatupad ng rotational torque.

Paggaya sa isang Kilusan ng BLDC Rotor
Sa simulate sa crude sa itaas maaari nating mailarawan kung paano ang pinakawalan na pabalik na EMF ay kinuha bilang sanggunian at ginagamit para sa paggawa ng mga pagkakasunod-sunod na pulso para sa mga kasunod na hanay ng paikot-ikot, na nagpapataw ng isang umiikot na metalikang kuwintas sa gitnang permanenteng magnet rotor. Ang simulation ay maaaring hindi eksaktong eksaktong pagtitiklop, gayunpaman nagbibigay ito ng isang magaspang na ideya ng prinsipyong nagtatrabaho.
Ito ay kagiliw-giliw na tandaan na ang pulso ay lumipat kapag ang N / S ng pang-akit ay eksaktong nasa gitna ng paikot-ikot na core, na nagbibigay-daan sa paikot-ikot na alinman sa magpalakas bilang N o S depende sa polarity ng pulso at makagawa ng isang nakakaakit at nagtataboy puwersa sa mga magnet na N / S, sa gayon bumubuo ng kinakailangang metalikang kuwintas sa maximum na posibleng antas.
At ito naman ay naging posible dahil sa likod ng EMF na inilabas sa pamamagitan ng paglipat ng nakaraang paikot-ikot.
Ang talakayan sa itaas ay linilinaw ang pagtatrabaho ng isang sensor na mas mababa ang BLDC motor, ngayon ay alamin natin kung paano hinahawakan ng isang tinukoy na circuit ang komplikadong pagpapatupad sa itaas ng isang 3 phase switching
BLDC Driver DRV10963
Matapos ang ilang Googling nakita ko ang circuitless driver na BLDC driver na gumagamit ng isang solong chip DRV10963 na gumagamit ng bale-wala na dami ng mga bahagi sa pagsasaayos at nagagawa pang magpatupad ng isang sopistikadong pagproseso para sa mga inilaan na pagkilos.
Ang DRV10963 ay isang state-of-the-art chip na partikular na idinisenyo upang mapatakbo ang sensor na mas mababa ang mga motor na BLDC sa pamamagitan lamang ng paghihintay sa likod ng EMF mula sa paikot-ikot na motor at paghahatid ng isang tumpak na utos sa paikot-ikot at pagganap ng isang pinakamainam na paikot na metalikang kuwintas sa rotor.
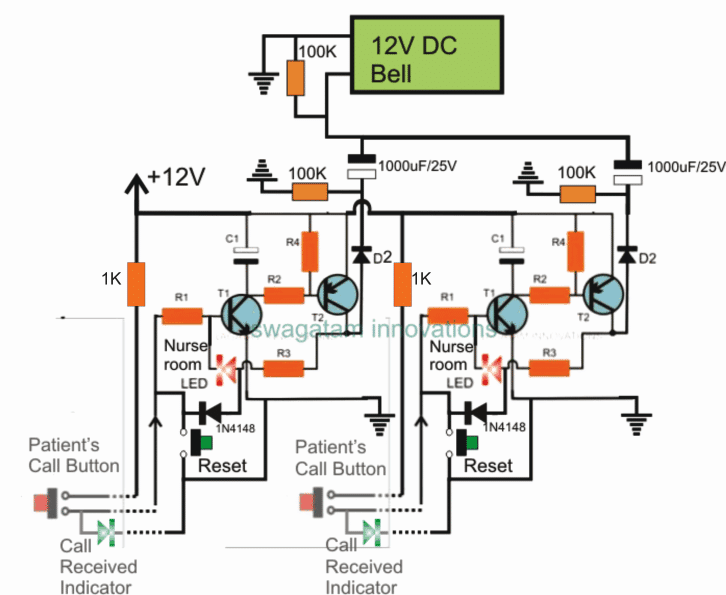
Diagram ng Circuit

Ipinapakita ng imahe sa itaas ang simpleng layout ng circuit na tila walang kasama kundi ang IC mismo.
Ang iba't ibang mga pinout ay inilalaan para sa pagsasakatuparan ng mga tinukoy na pag-andar tulad ng kontrol ng bilis ng PWM ng motor, kontrol sa direksyon, atbp sa pamamagitan lamang ng pagpapakain sa mga nauugnay na pinout ng tinukoy na mga datas mula sa isang panlabas na mapagkukunan.
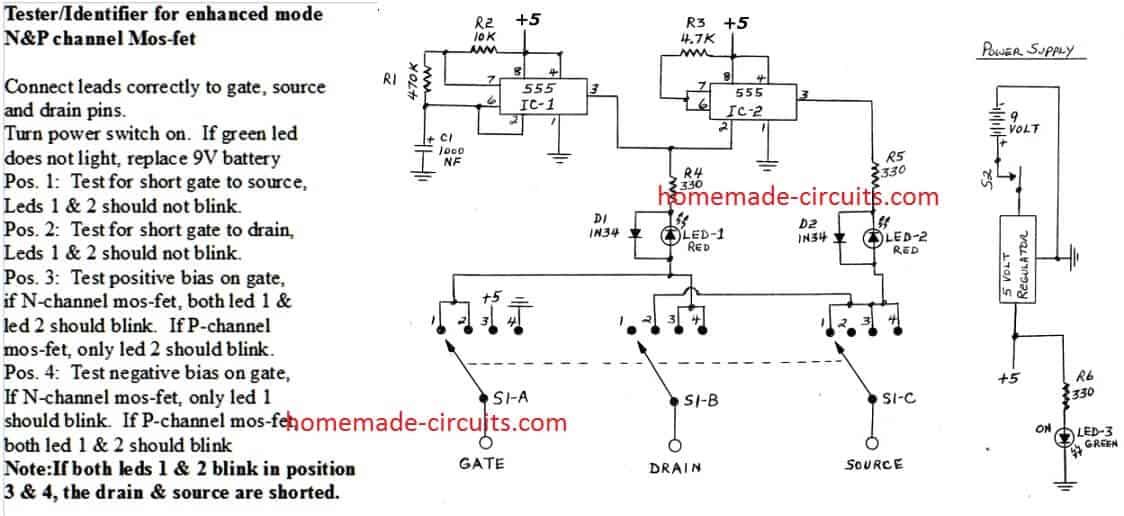
Ipinapakita ng sumusunod na imahe ang pakete ng maliit na tilad, na mukhang isang 10 pin DIL IC, ang iba't ibang mga pagpapaandar na pinout ng pareho ay maaaring pag-aralan mula sa data tulad ng ibinigay sa ilalim ng diagram:

Sumangguni sa circuit diagram ng iminungkahing circuitless driver ng BLDC na walang sensor tulad ng ipinakita sa nakaraang artikulo at pati na rin ang imahe ng maliit na tilad sa itaas, maaaring maunawaan ang mga detalye ng mga pinout tulad ng sumusunod:
Mga Detalye ng IC Pinout
FG = Ito ang pin na tagapagpahiwatig ng bilis ng motor (output), na kung saan ay rigged sa isang bukas na mode ng kolektor na may isang panloob na BJT.
Ang bukas na kolektor ay nangangahulugan na ang output sa pinout na ito ay magbubunga ng mga negatibong PWM sa pamamagitan ng paglubog ng mga lohika sa bukas na kolektor at lupa, sa gayon upang makakuha ng wastong pagbabasa na kailangan ng gumagamit na kumonekta ng isang pull up risistor sa bukas na kolektor na ito at ang positibong panustos (5V ) para sa pagtupad ng bilis ng pahiwatig sa pinout na ito.
FGS = Ito ang input ng tagapili ng tagapagpahiwatig ng bilis, nangangahulugang isang mataas o mababa ang lohika ay maaaring ipakilala dito para sa paglipat ng ON / OFF sa tagapagpahiwatig na FG.
Vcc = Ang positibong supply sa IC para sa pagpapagana nito upang mapatakbo, ay hindi dapat lumagpas sa 5V.
Ang W, U at V ay ang mga 3-phase na output para sa BLDC motor na dapat na pinamamahalaan sa pamamagitan ng IC na ito. Gumagawa rin ito tulad ng mga input para sa sensing ng motor EMF na pulso para sa kinakailangang naka-synchronize na paglipat ng mga motor coil.
GND = Tumutukoy sa negatibong pinout ng suplay ng IC tungkol sa Vdd pin.
FR = Tumutulong upang piliin o utusan ang direksyon ng motor at maaaring mapalitan nang binago anumang oras sa sandaling mapagana ang system, sa pamamagitan lamang ng pagpapakilala ng isang panlabas na lohika na mataas o mababa ang lohika.
PWM = Ito ay nangangahulugan ng input ng control ng PWM mula sa isang panlabas na PWM waveform generator.
Ang input ng PWM na ito ay maaaring variable para sa pagpapatupad ng nais na kontrol sa bilis ng nakakonektang BLDC motor.
Ang may tuldok na puwang sa gitna ng maliit na tilad ay nagpapahiwatig ng thermal pad, na maaaring mai-clamp o idikit gamit ang isang heatsink upang mapalubog ang posibleng henerasyon ng init sa maliit na tilad habang ginagamit ito ng isang may karga na motor na BLDC.
Ang talakayan sa itaas ay nagsasaad ng pinout o mga detalye ng koneksyon ng walang sensor na BLDC motor driver chip DRV10963, pag-aralan natin ngayon ang panloob na pagsasaayos at paggana ng maliit na tilad nang detalyado sa tulong ng mga sumusunod na puntos:
Paglalarawan ng Device
Ang DRV10963 ay isang 3 phase sensorless electric motor operator na may built-in na kapangyarihan MOSFETs (3-phase H-bridged). Ito ay iniakma para sa mas mataas na pagiging produktibo, nabawasan ang ingay at kaunting pangalawang materyal na bilangin ang mga pagpapaandar ng motor drive. Ang eksklusibong sensorless window-Iess 180 ° sinusoidal management scheme ay naghahatid ng kahusayan sa pag-commute ng motor na walang ingay.
Ang DRV10963 na binubuo ng isang matalinong lock ay nakakakita ng pag-andar, na pinagsama sa mga pandagdag na in-built na circuit ng seguridad upang makamit ang nakaseguro sa pagganap. Ang DRV10963 ay matatagpuan sa isang thermally mahusay na 10- pin na USON na nakaimpake na may walang takip na thermal mat.
Paano gumagana ang IC
Ang produktong DRV10963 ay isang 3 phase sensorless motor operator na may infuse power MOSFETs, Ito ay
partikular na nilikha para sa higit na mahusay na pagganap, nabawasan ang resonance at minimum na mababaw na bahagi na bilangin ang mga pagpapaandar ng motor drive.
Ang pangunahing sensorless window-mas mababa sa 180 ° sinusoidal control plan ay nagpapakita ng walang ingay na paggana ng motor sa pamamagitan ng pagpapanatili ng electrically stimulated na torque ripple nominal. Sa pagsisimula, ang aparato ng DRV10963 ay i-on ang motor sa kurso na tinukoy sa pamamagitan ng FR input pin.
Ang DRV10963 chip ay gagana ang isang 3 phase BLDC motor na gumagamit ng isang sinusoidal control plan.
Ang kahalagahan ng nagpapatrabaho na mga voltase ng sinusoidal phase ay nakasalalay sa cycle ng tungkulin ng PWM pin. Habang ang motor ay gumagalaw, ang DRV10963 IC ay naghahatid ng data ng tulin sa FG pin.
Ang unit ng DRV10963 ay binubuo ng isang kakayahan sa smart sense sense. Sa kaganapan tulad ng kung saan ang motor ay nababalisa ng isang labis na presyon, makikilala ng programa ang problema sa pagla-lock at magsasagawa ng mga hakbang upang maalagaan ang sarili nitong kasama ng motor.
Ang partikular na pamamaraan ng lock sense circuit ay inilalarawan nang detalyado sa Lock Detection. Kasama rin sa DRV10963 IC ang maramihang mga built-in na circuit ng kaligtasan halimbawa sa kasalukuyang proteksyon, higit sa proteksyon ng boltahe, sa ilalim ng proteksyon ng boltahe, at higit sa proteksyon ng temperatura.
Katangian na Paliwanag
Pag-input ng Bilis at Pagkontrol
Ang DRV10963 ay nagtatanghal ng 3-phase 25-kl-lz PWM output na maaaring magkaroon ng isang karaniwang porsyento ng sinusoidal waveforms mula sa bawat yugto. Kung sakaling ang anumang pag-ikot ay natutukoy patungkol sa lupa, ang napansin na form ng alon ay maaaring isang protektado ng PWM na sinusoid na sinamahan ng mga pagkakasunud-sunod ng ika-3 order tulad ng ipinakita sa Larawan 2.

Ang diskarte sa pag-coding na ito ay streamline ang mga pagtutukoy ng driver para sa kadahilanang marahil ay madalas na isang yugto ng output na maaaring maging par na zero.
Ang amplitude ng kinalabasan ay nag-iiba ayon sa supply boltahe (VCC) at ang utos na PWM duty cycle (PWM) na tinukoy sa Equation 1 at naka-highlight sa Larawan 3. Ang pinakamainam na amplitude ay ipinatupad sa sandaling ang itinuro na PWM duty cycle ay 100 PERCENT.
Vphpk = PWMdc>

Ang bilis ng motor ay kinokontrol hindi direkta sa pamamagitan ng paggamit ng pagkakasunud-sunod ng PWM upang makontrol ang amplitude ng phase voltages na nangyari na gagamitin para sa motor.
Ang cycle ng tungkulin ng pag-input ng PWM ay binago sa isang 9 na digital na dami (mula 0 hanggang 511).
Ang resolusyon ng regulasyon ay 1/512 == 0.2%. Pinapabilis ng analyzer ng duty cycle ang isang paunang operasyon ng palitan ng order sa gitna ng input cycle ng tungkulin at ang 9 bits na digital figure.
Ito ay naka-highlight sa Larawan 4, kung saan r = 80 ms.

Ang pagganap ng palitan sa pagitan ng PWM na iniutos na cycle ng tungkulin kasama ang output maximum na amplitude ay variable sa aparato ng DRV10963.
Ang maximum na amplitude ng kinalabasan ay tinalakay ng Equation 1 kapag ang PWM utos> minimum na paggana ng cycle ng tungkulin. Ang pinakamababang ikot ng tungkulin sa pagpapatakbo ay madalas na itinatag sa posibleng 13%, 10%, 5% o walang paghihigpit ng setting ng OTP (MINOP_DC1: 0).
Ipinapakita ng Talahanayan 1 ang mga inirekumendang pagsasaayos para sa kaunting ikot ng tungkulin sa pagpapatakbo.
Kailan man ang PWM na inatasan na ikot ng tungkulin ay mas mababa sa pinakamababang pag-andar ng ikot ng tungkulin at higit sa 1.5%, ang output ay makokontrol sa kaunting pag-ikot ng tungkulin sa pagpapatakbo. Anumang oras ang ikot ng tungkulin ng pag-input ay nasa ilalim ng isang 1.5%, ang aparato ng DRV10963 ay malamang na hindi patakbuhin ang output, at ipapadala sa standby mode.
Maaari itong mailarawan sa Larawan 6.

Mga Pag-rotate na Configurasyon
Sisimulan ng DRV10963 ang motor sa pamamagitan ng isang pamamaraan na makinis na detalyado sa Larawan 7.

Ang graph ng pagpapasimula ng motor ay binubuo ng mga aparato na maaaring i-configure ang mga kahalili para sa bukas na loop upang isara ang limitasyon ng pagbabago ng loop (HOW.), Ihanay ang oras (TAHQH), at mapabilis ang rate (RACE).
Upang mapila ang rotor sa lohika ng pagpapalit ang DRV10963 ay nagpapatupad ng isang x% na ikot ng tungkulin sa mga phase V at W sa parehong oras na pagkontrol sa yugto U sa GND.
Ang senaryong ito ay napapanatili sa loob ng segundo ng TAIign. Ang x% na kahalagahan ay kinilala ng boltahe ng VCC (tulad ng ipinakita sa Talahanayan 2) upang mapanatili ang sapat na paikot na metalikang kuwintas sa iba't ibang magkakaibang mga boltahe ng suplay.
Tulad ng pagkakasunud-sunod ng pagkakasunod, ang motor ay pinilit na mapabilis sa pamamagitan ng paglalagay ng mga voltase ng sinusoidal phase na may mga antas ng rurok tulad ng nakalarawan sa Talahanayan 2 at pagpapalakas sa pamamagitan ng saklaw ng pag-commute sa isang lumalawak na rate na kinakatawan ng RACE hanggang sa ang antas ng pagbawas ay lumago sa Hom ., Hz.
SA lalong madaling dumating ang limitasyong ito, ang DRV‘l0963 ay nagko-convert sa closed loop mode kung saan ang pag-unlad ng commutation drive ay kinikilala ng in-built control algorithm habang ang boltahe na nagtrabaho ay kinilala ng PWM na ipinag-utos ng input ng duty cycle.
Ang bukas na loop upang isara ang limitasyon ng pagbabago ng loop (Hom), ihanay ang oras (TAHQH), at ang mapabilis na rate (RACE) ay mai-configure sa pamamagitan ng mga pagsasaayos ng OTP.
Ang pagpili ng handoff threshold (PAANO,) ay karaniwang naaprubahan ng pagsubok sa pagtatasa at error. Ang layunin ay gugustuhin ang isang pagpapaubaya sa handoff na maaaring maging kasing maliit na magagawa at binibigyang-daan ang motor na walang kahirap-hirap at matapat na pagbabago sa pagitan ng bukas na pagbilis ng loop at ng pagsasara ng loop.
Karaniwang nadagdagan ang mga bilis ng motor (pinakamataas na bilis) na kinakailangan ng isang higit na pagpapahintulot sa handoff dahil sa angat ng mataas na bilis ng motor ay bumubuo ng nabawasan Kt samakatuwid ay mas abot-kayang BEMF.
Ipinapakita ng Talahanayan 3 ang mai-configure na mga kagustuhan para sa pagpapaubaya ng handoff. Pinakamataas na bilis sa electrical Hz ay napatunayan bilang isang sanggunian upang makatulong sa pagpili ng kanais-nais na bilis ng handoff para sa isang tukoy na pagsumite.

Ang pagpili ng align time (TAHQH) at mapabilis ang rate (RACE) ay maaaring maging nakasalalay sa pagsubok at error sa pagsusuri.
Ang mga motor na may mas mataas na pagkawalang-galaw ay karaniwang hinihiling ang isang pinalawig na oras ng pag-align at isang mas mabagal na bilis ng rate ng kaibahan sa kaibahan sa mga motor na may mababang pagkawalang-galaw na karaniwang hinihiling ang isang briefer align time kasama ang isang mas mabilis na porsyento. Ang mga tradeoffs ng programa ay kailangang ipatupad upang mapakinabangan sa paglulunsad ng katatagan na taliwas sa pag-ikot ng panahon.
Ang pag-eendorso ng TI ay nagsisimula sa pagpapasya sa hindi gaanong matinding mga pagsasaayos (mas mabagal na karera at makabuluhang Tmign) upang ikompromiso ang oras ng metalikang kuwintas sa suporta ng maximum na rate ng pagtupad.
Sa sandaling ang kagamitan ay nakumpirma upang maisagawa nang matindi ang labis na mga malalakas na pagsasaayos (mas malaking RACC at mas kaunting TAHQH) ay maaaring magamit upang mabawasan ang sandali ng pag-up at nang sabay na maingat na subaybayan ang rate ng katuparan.
Ipinapakita ng Talahanayan 4 ang mga naka-configure na setting para sa TA'g ,, at RACE.

Ang natitirang bahagi ng paliwanag hinggil sa walang sensor na BLDC IC ay inayos sa orihinal na datasheet na ito
Mangyaring huwag mag-atubiling magbigay ng puna upang malaman ang tungkol sa nabanggit sa itaas na mga detalye ng walang sensor na BLDC motor driver circuit
Nakaraan: 12V LED Backpack Power Supply Circuit Susunod: Quadcopter Remote Control Circuit nang walang MCU