Ang unang matagumpay na pagtatasa ng teorya ng kontrol ng PID ay praktikal na na-verify sa larangan ng mga awtomatikong sistema ng pagpipiloto para sa mga barko, pabalik sa paligid ng taon 1920. Pagkatapos nito ay inilapat ito sa iba't ibang mga kontrol sa awtomatikong pang-industriya na nangangailangan ng na-optimize at tumpak na mga pagtutukoy ng output ng pagmamanupaktura. Para sa mga yunit ng pagmamanupaktura ang PID ay popular na ipinatupad para sa pagkamit ng tumpak na kontrol sa niyumatik, at sa huli ang teorya ng PID ay inilapat sa mga elektronikong tagakontrol sa modernong panahon.
Ano ang PID Controller
Ang term na PID ay ang acronym para sa proporsyonal na integral derivative controller, na kung saan ay isang mekanismo ng loop ng feedback, na idinisenyo upang tumpak na makontrol ang iba't ibang mga makinarya ng kontrol sa industriya, at maraming iba pang mga katulad na aplikasyon na nangangailangan ng kritikal at awtomatikong mga kontrol sa modulate.
Upang maipatupad ito, patuloy na sinusubaybayan ng isang PID controller ang pagpapatakbo ng system, at kinakalkula ang sapilitan na elemento ng error. Sinusuri din nito ang instant na halaga ng error sa anyo ng pagkakaiba sa pagitan ng kinakailangang set-point (SP), at ang sinusukat na variable ng proseso (PV).
Na may sanggunian sa itaas, isang instant at awtomatikong pagwawasto ng feedback ay naisakatuparan sa mga tuntunin ng proporsyonal (P), integral (I), at mga derivative (D) na expression, at samakatuwid ang pangalang PID controller.
Sa mga simpleng salita, patuloy na sinusubaybayan ng isang PID controller ang pagtatrabaho ng isang naibigay na system ng makina, at patuloy na naitatama ang tugon ng output nito depende sa mga pagkakaiba-iba na dulot ng panlabas na impluwensya, sa pamamagitan ng isang tinukoy na algorithm. Sa gayon tinitiyak nito na ang makina ay laging gumagana sa loob ng itinakdang mainam na mga kundisyon.
Pag-unawa sa Diagram ng PID Block
Ang isang PID controller ay itinuturing na isang maraming nalalaman control system dahil sa kakayahang tuklasin at pamahalaan ang 3 mga parameter ng kontrol: proporsyonal, integral at hango, at ilapat ang inilaan na pinakamainam na kontrol sa output na may matinding katumpakan, na may sanggunian sa 3 mga parameter na ito.
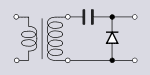
Ipinapakita ng imahe sa ibaba ang diagram ng block ng PID. Mabilis nating maunawaan ang pangunahing prinsipyo ng pagtatrabaho ng isang PID sa pamamagitan ng pag-refer sa block diagram na ito.

kagandahang-loob ng imahe: tl.wikipedia.org/wiki/File:PID_en.svg
Makikita namin dito ang isang hanay ng mga variable tulad ng e (t) na naaayon sa halaga ng error, r (t) na naaayon sa naka-target na set point, at y (t) bilang sinusukat na variable ng proseso. Sinusubaybayan ng PID controller sa buong operasyon nito ang error na halaga e (t) sa pamamagitan ng pagtatasa ng pagkakaiba sa pagitan ng inilaan na setpoint r (t) o SP at sinusukat ang halaga ng proseso y (t) o PV, at dahil dito ay nagsasagawa ng pagwawasto ng feedback o pag-optimize gamit ang mga parameter. katulad: proportional, integral, at derivative.
Patuloy na gumagawa ng isang pagsisikap ang controller na bawasan ang epekto ng error sa kabuuan, sa pamamagitan ng pag-aayos ng variable ng kontrol u (t) sa mga sariwang halaga batay sa pinag-aralan na timbang na kabuuan ng mga termino para sa pagkontrol (p, I, d).
Halimbawa, sa pagpapatakbo ng isang control ng balbula, ang pagbubukas at pagsasara nito ay maaaring patuloy na magkakaiba-iba ng isang PID sa pamamagitan ng mga kumplikadong pagtatasa, tulad ng ipinaliwanag sa itaas.
Sa ipinakita na sistema ang iba't ibang mga termino ay maaaring maunawaan tulad ng ipinaliwanag sa ibaba:
P- Controller:
Ang term na P ay proporsyonal sa mga instant na halaga ng error e (t) na nakuha sa pamamagitan ng pagtatasa ng resulta para sa SP - PV. Sa sitwasyon kung kailan ang halaga ng error ay may kaugaliang maging malaki, ang output ng kontrol ay nakakakuha din nang proporsyonal na mas malaki sa pagsangguni sa nakuha na factor na 'K'. Gayunpaman sa isang proseso na nangangailangan ng kompensasyon tulad ng sa pagkontrol sa temperatura, ang proporsyonal na kontrol na nag-iisa ay maaaring humantong sa mga kamalian sa buong setpoint at ang tunay na halaga ng proseso, dahil hindi ito maaaring gumana nang kasiya-siya nang walang isang error sa feedback upang makabuo ng proporsyonal na tugon. Ipinapahiwatig na walang feedback sa error, maaaring hindi posible ang wastong pagwawasto na tugon.
Ako- Controller:
Ang term na naging responsable ako para sa dating nasuri na mga halaga ng mga error sa SP - PV, at isinasama ito sa panahon ng pagpapatakbo nito upang likhain ang terminong I. Halimbawa habang inilalapat ang proporsyonal na kontrol kung ang SP - PV ay gumagawa ng ilang error, ang parameter na I nagiging aktibo at pagtatangka na wakasan ang natitirang error. Talagang nangyayari ito sa isang tugon sa pagkontrol na na-trigger dahil sa pinagsama-samang halaga ng error na naitala sa isang mas maagang panahon. Sa sandaling nangyari ito ang term na tinitigil ko ay humihinto sa pagpapahusay ng anumang karagdagang. Ito ay sanhi ng proporsyonal na epekto sa kaukulang pag-minimize habang ang error factor ay natapos, kahit na ito ay nababayaran din habang lumalaki ang integral na epekto.
D- Controller:
Ang katagang D ay isang pinakaangkop na approximation na nabawas para sa umuusbong na mga uso para sa error na SP - PV, depende sa instant na rate ng pagbabago ng factor ng error. Kung ang rate ng pagbabago na ito ay mabilis na nagpapahusay, ang kontrol sa feedback ay nagpapatupad ng mas agresibo, at sa kabaligtaran.
Ano ang PID Tuning
Ang mga tinalakay na parameter sa itaas ay maaaring mangailangan ng wastong pagbabalanse para masiguro ang pinakamainam na pag-andar ng kontrol, at nakamit ito sa pamamagitan ng isang proseso na tinatawag na 'loop tuning'. Ang mga kasangkot na mga tuning Constant ay tinukoy bilang 'K' tulad ng ipinakita sa mga sumusunod na pagbabawas. Ang bawat isa sa mga Constant na ito ay dapat na indibidwal na nagmula para sa isang napiling application, dahil ang mga Constant ay mahigpit na nakasalalay at nag-iiba ayon sa mga katangian at impluwensya ng tukoy na panlabas na mga parameter na kasangkot sa loop. Maaaring isama dito ang tugon ng mga sensor na ginagamit para sa pagsukat ng isang naibigay na parameter, ang pangwakas na elemento ng throttling tulad ng isang control balbula, isang posibleng oras na lumipas sa loop signal at ang proseso mismo atbp.
Maaaring katanggap-tanggap na gumamit ng mga tinatayang halaga para sa mga pare-pareho sa simula ng pagpapatupad batay sa uri ng aplikasyon gayunpaman maaari itong panghuliang mangangailangan ng ilang seryosong mahusay na pag-tune at pag-aayos sa pamamagitan ng praktikal na pag-eeksperimento, sa pamamagitan ng pagpuwersa sa mga pagbabago sa mga itinakdang puntos at pagkakasunod na pagmamasid sa tugon ng kontrol ng system.
Kahit na isang modelo ng matematika o sa praktikal na loop, parehong makikita ang paggamit ng isang 'direktang' pagkilos na kontrol para sa mga tinukoy na term. Nangangahulugan kung ang isang pagtaas sa isang positibong error ay nakita, isang magkaparehong pinataas na positibong kontrol ay pinasimulan upang makontrol ang sitwasyon para sa mga kasangkot na mga termino na buod.
Gayunpaman maaaring ito ay kinakailangan upang maibalik sa mga aplikasyon kung saan ang output parameter ay maaaring magkaroon ng isang salungat na naka-configure na katangian na nangangailangan ng isang pagwawasto ng panukalang-batas. Isaalang-alang natin ang halimbawa ng isang daloy ng daloy kung saan tinukoy ang proseso ng pagbubukas ng balbula upang mapatakbo gamit ang 100% at 0% na output, ngunit kailangang makontrol na may katumbas na 0% at 100% na output, sa kasong ito ang isang pabalik na pag-iwas na pag-iwas ay naging mahalaga. Upang mas tumpak isaalang-alang ang isang sistema ng paglamig ng tubig na may tampok na proteksyon kung saan kinakailangan ang balbula na maging 100% na bukas habang nawala ang signal. Sa kasong ito ang output output ay dapat na maaaring baguhin sa 0% na kontrol sa kawalan ng isang senyas, upang ang balbula ay maaaring buksan sa isang buong 100%, ito ay tinatawag na 'reverse acting' control.
Matematika na Modelo ng Pag-andar ng Pagkontrol

Sa modelong matematika na ito, ang lahat ng hindi negatibong mga Constant na Kp, Ki, at Kd ay nangangahulugang mga coefficients para sa proporsyonal, integral, at mga derivative na termino ayon sa pagkakabanggit (sa ilang mga okasyon ay tinukoy din ang P, I, at D).
Pagpapasadya ng Mga Tuntunin sa Control ng PID
Mula sa mga talakayan sa itaas naintindihan namin na sa panimula ang sistema ng kontrol ng PID ay gumagana sa tatlong mga parameter ng kontrol, subalit ang ilang mas maliit na mga application ay maaaring mas gusto ang paggamit ng isang pares ng mga term na ito o kahit isang solong term sa labas ng tatlong mga term.
Ang pagpapasadya ay ginagawa sa pamamagitan ng pag-render ng hindi nagamit na term sa isang zero setting, at isinasama ang pares ng mga term na PI, PD o solong mga termino tulad ng P o I. Kabilang sa mga ito, ang pagsasaayos ng PI controller ay mas karaniwan dahil ang term D ay karaniwang madaling kapitan ng ingay impluwensya at samakatuwid ay natanggal sa karamihan ng mga kaso, maliban kung mahigpit na ipinag-uutos. Karaniwang kasama ang terminong I dahil tinitiyak nito ang system upang makamit ang inilaan na pinakamainam na target na halaga sa output.
Nakaraan: Paano Magdisenyo ng isang Flyback Converter - Comprehensive Tutorial Susunod: 5 KVA hanggang 10 KVA Awtomatikong Boltahe Stabilizer - 220 Volts, 120 Volts