A Multirotor Drone ay isang uri ng UAV na may iba't ibang mga rotors, tulad ng apat na rotors, anim na rotors, walong rotors, o higit pa, batay sa kanilang disenyo at paggamit. Ngunit ang labis na rotors ng drone na ito ay maaaring dagdagan ang kapasidad ng kargamento, oras ng paglipad, katatagan, atbp. Ito ang pinakamurang at pinakamadali drone , na nagbibigay ng mataas na kontrol sa pag -frame at posisyon. Kaya, ang mga ito ay mainam para sa pagsubaybay at pang -aerial photography. Ang mga drone ng multirotor ay magagamit sa iba't ibang uri, tulad ng trimotor, quadrotor, hexacopter, octocopter, at coaxial multi-rotor drone. Ito ang mga pinaka -karaniwang uri ng UAV, at ang bawat uri ng drone ay naiiba sa pagganap, disenyo, at kakayahan nito. Ang artikulong ito ay nagpapaliwanag sa isa sa mga uri ng mga drone ng multirotor, tulad ng quadcopter, pagtatrabaho, at mga aplikasyon.
Ano ang isang quadcopter?
Ang isang quadcopter ay isang uri ng UAV na pinapagana ng apat rotors , kung saan ang bawat rotor ay may motor at isang propeller. Ang isang drone ng quadcopter ay gumagamit ng apat na rotors para sa pag -angat at propulsion, kaya maaari itong mag -alis at patayo na lupa at naaanod sa lugar. Kaya ang dalawang rotors ng drone na ito ay umiikot sa sunud -sunod, samantalang ang iba pang dalawang rotors ay umiikot sa counterclockwise upang kanselahin ang metalikang kuwintas at bigyan ng patuloy na kontrol sa paglipad. Maaari itong kontrolado nang manu -mano o nakapag -iisa, kaya ito ay isa sa mga pinakatanyag na uri ng mga drone dahil sa pagiging simple, katatagan, at kakayahang magamit.
Ang mga Quadcopter ay naiiba sa pamamagitan ng kanilang disenyo ng apat na rotor upang makontrol ang mga advanced na aerodynamics, mekanika, at electronics. Ang eksklusibong disenyo nito ay nagbibigay ng kakayahang magamit at higit na katatagan kaysa sa karaniwang mga helikopter ng single-rotor.
Kasaysayan ng Quadcopter:
Ang quadcopter ay isang uri ng multi-rotor drone na malawak na umusbong mula sa mga naunang disenyo nito. Kaya ang sunud-sunod na kasaysayan ng quadcopter ay tinalakay sa ibaba.
- Jacques & Louis Bréguet Noong 1907 ay binuo at sinubukan ang Gyroplane No. 1. Ito ay isang maagang ideya ng quadcopter, na nakamit ang pag-take-off ngunit nahaharap sa kawalang-tatag batay sa mga sistema ng aerospace ng cross-blade.
- Si Etienne Oehmichen ay lumikha ng isa pang maagang quadcopter tulad ng Oehmichen noong 1920, na nagpapakita ng paglipad at pagtatakda ng isang pandaigdigang tala.
- Sa U.S. Navy, 1930 ay nag-eksperimento sa sasakyang panghimpapawid na kinokontrol ng radyo, na humantong sa pag-unlad ng drone ng Curtiss N2C-2.
- Ang Bell Boeing Quad Tiltrotor noong 1990 ay pinagsama ang parehong mga disenyo ng pakpak at quadcopter para sa mga aplikasyon ng transportasyon ng militar.
- Iminungkahi ng Amazon ang isang komersyal na teknolohiya ng drone noong 2013 para sa isang sistema ng paghahatid
- Ang Airbus ay nakabuo ng isang baterya na pinapagana ng baterya sa 2018 para sa mga air air taxis upang maghangad para sa autonomous na operasyon sa ilang mga punto.
- Sa kasalukuyan, ang mga drone na ito ay ginagamit nang malawak para sa iba't ibang mga layunin tulad ng paglipad sa libangan, pang -aerial photography, paghahatid, pagsubaybay, atbp.
Mga sangkap ng isang quadcopter
Ang isang quadcopter ay dinisenyo na may maraming susi mga sangkap , na ipinaliwanag sa ibaba.

Frame
Ang frame ng quadcopter ay may mga armas na may hawak na motor, baterya, ang flight controller, atbp.
Motors
Kasama sa quadcopter ang apat na motor, na ginagamit upang maiangat ito. Ngunit may iba't ibang uri ng motor na magagamit sa merkado.
ESC
Dahil ang quadcopter Motors Karaniwan ay nangangailangan ng 3 3-phase supply, hindi namin ito magagamit bilang isang direktang supply. Kaya hinihiling namin ang ESC na baguhin ang mga signal ng controller at ipadala ang mga ito sa mga motor upang makontrol ang kanilang bilis.
Propellers
Ang mga propeller ay isang makabuluhang sangkap ng drone. Ang mga ito ay umiikot na mga blades na gumagana tulad ng mga pakpak sa iyong drone at lumikha ng daloy ng hangin upang maiangat ang iyong drone sa hangin.
Flight Controller
Ang pangunahing pag -andar ng flight controller ay upang idirekta ang RPM ng bawat motor bilang tugon sa pag -input. Kaya ang utos ng pilot para sa quad-copter ay tumutulong upang sumulong at pinakain sa flight controller upang magpasya kung paano makontrol ang mga motor, dahil dito.
RC Transmitter & Receiver
Kontrol ng Radio Transmitters & Receiver Elektrisidad , na nagreresulta sa kapaki -pakinabang na paghahatid ng data sa pamamagitan ng puwang o sa kapaligiran. Gumagamit sila ng mga signal ng radyo upang wireless na magpadala ng mga utos sa pamamagitan ng isang set ng dalas ng radyo sa itaas ng tatanggap ng radyo. Kaya konektado ito sa flight controller ng quadcopter, na malayo ay kinokontrol.
Baterya
Gumagamit ang isang quadcopter ng isang mapagkukunan ng baterya ng baterya upang himukin ang lahat ng mga system ng iyong drone sa pamamagitan ng pagpapahintulot na lumipad ito. Sa wakas, ang isang baterya ng lithium polymer (LIPO) ay kinakailangan upang mabigyan ng kapangyarihan ang quadcopter, kaya ang oras ng paglipad ng quadcopter ay pangunahing nakasalalay sa kapasidad ng baterya. Ang pagpili ng isang baterya higit sa lahat ay nakasalalay sa laki, boltahe, c rating, kapasidad, atbp.
Miscellaneous
Kasama sa Miscellaneous ang maliliit na accessories tulad ng iba't ibang mga jumper cable at mga konektor ng bullet, na ginagawang perpekto at mas matatag ang iyong quadcopter.
Paano gumagana ang isang quadcopter?
Ang mga Quadcopter ay maaaring lumipad na may apat na rotors, kung saan ang bawat isa ay may kasamang motor at propeller upang makabuo ng pag -angat at kontrol ng paggalaw sa loob ng hangin. Ang mga drone na ito ay maaaring makamit ang paglipad sa pamamagitan ng pagbabago ng bilis ng bawat rotor, kaya nakakaapekto sa dami ng nabuong pag -angat at tulak sa pamamagitan ng pagpapahintulot sa kinokontrol na paggalaw sa lahat ng mga direksyon.
Ang flight ng isang quadcopter ay nakasalalay sa prinsipyo ng apat na rotors 'thrust & tumpak na kontrol. Kaya, narito ang isang pagkasira ng pagtatrabaho nito.
- Kapag ang lahat ng apat na rotors ay umiikot pagkatapos ay gumawa sila ng daloy ng hangin pababa at itulak paitaas. Kailanman ang nabuo na kabuuang ng mga rotors ay lumampas sa bigat ng quad-copter pagkatapos ay tumagal ito.
- Upang ma -drift sa lugar, binago ng flight controller ang lahat ng apat na bilis ng rotors upang makabuo ng sapat na tulak upang mai -offset ang gravity.
- Ang bilis ng apat na rotors ay pantay na nadagdagan upang makabuo ng mas maraming thrust kumpara sa timbang. Kaya ang bilis ay mababawasan upang bumaba.
- Ang likuran ng mga rotors ay mas madali at sumulong kaysa sa mga front rotors, at ang pagtagilid ng quadcopter pasulong ay gumagawa ng thrust. Ang bilis ng paatras na paggalaw ng front rotors ay maaaring makamit sa pamamagitan ng pagtaas.
- Ang kanang bahagi ng rotors ng drone na ito ay mas mabilis na gumalaw upang ilipat ang kaliwa kaysa sa kaliwang rotors, at ikiling ang drone ng quadcopter sa kaliwa. Dito, ang paggalaw sa kanan ay maaaring makamit sa pamamagitan ng pagtaas ng kaliwang bilis ng rotor.
- Upang paikutin ang yaw clockwise, dalawang rotors na pahilis sa tapat ng paikutin nang mas mabilis, samantalang ang iba pang dalawang rotors ay umiikot nang mas mabagal, sa gayon ay lumilikha ng isang umiikot na puwersa. Sa pamamagitan ng pag-reversing ito, maaaring makamit ang kontra-sunud-sunod na pag-ikot.
- Ang data ng sensor ay maaaring masubaybayan nang patuloy ng flight controller. Kaya ginagawang micro-adjustment sa bilis ng bawat motor upang mapanatili ang katatagan at isagawa ang mga utos ng piloto.
Mga uri ng quadcopter
Mayroong iba't ibang mga uri ng quadcopter na magagamit sa merkado batay sa kanilang mga hugis ng frame at inilaan na paggamit, na ipinaliwanag sa ibaba.

X Quadcopter o X-Configuration:
Ang ganitong uri ng quadcopter ay may pinakapopular na disenyo na nagbibigay ng isang mahusay na balanse ng katatagan at kakayahang magamit. Ginagamit ito sa iba't ibang mga aplikasyon tulad ng videography, karera, pang -aerial photography, acrobatic flying, fpv racing,
H Quadcopter o H-Configuration:
Ang H quadcopter ay may isang hugis na H-shaped na frame, na nagbibigay ng mas mahusay na katatagan. Kaya ang drone na ito ay maaaring magamit sa aerial photography, batay sa devopedia.
+ Quadcopter o + pagsasaayos:
Ang quadcopter na ito ay nangunguna sa loob ng tuwid na mga daanan ng paglipad, kabilang ang mga aerodynamically mahusay na posisyon ng propeller, na madalas na ginagamit sa loob ng paglipad ng akrobatik. Ginagamit ito sa mas simpleng mga scheme ng control ng ilang mga aplikasyon.
Y4 Quadcopter o pagsasaayos ng Y4:
Ang drone na ito ay katulad ng isang tricopter na may tatlong braso, ngunit ang likurang braso nito ay may kasamang dalawang motor na naka -mount na coaxially para sa mas mahusay na kontrol ng yaw at at pag -angat ng kapangyarihan.
A-tail o v-tail quadcopter:
Ang drone na ito ay katulad ng Y4quadcopter, maliban sa mga likurang motor na matatagpuan sa isang anggulo sa isang hugis ng A o V, na nagbibigay ng higit na kontrol sa yaw.
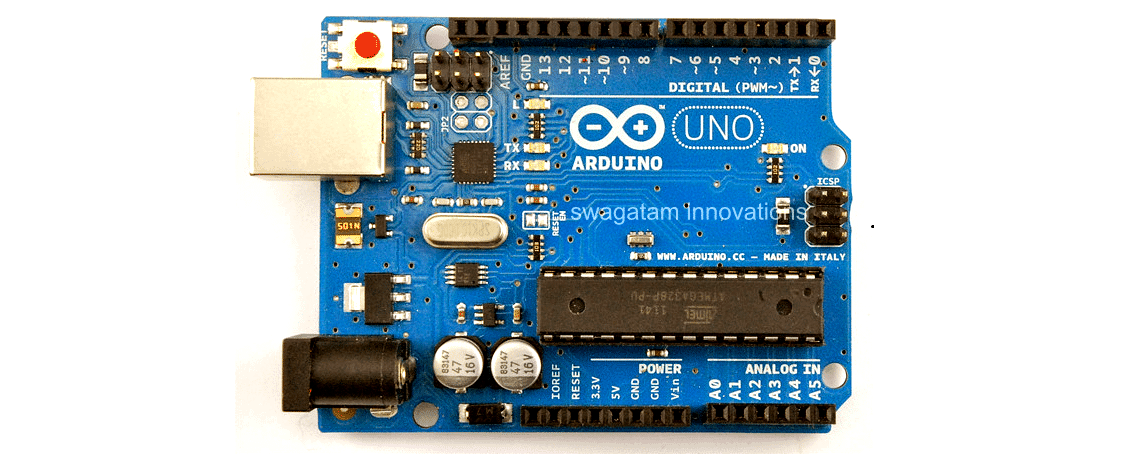
Quadcopter gamit ang Arduino
Ang isang flight controller ay ang utak ng quadcopter. Karaniwan, maraming mga pre-flashed flight controller na magagamit din sa merkado na may mas kaunting gastos. Kaya ang isang flight controller na idinisenyo kasama si Arduino para sa isang quadcopter ay ipinapakita sa ibaba. Ang Multiwii ay isang sikat na software ng flight controller na ginamit para sa DIY quadcopters.
Kaya't magdisenyo tayo ng isang quadcopter na may Arduino, tulad ng ipinakita sa ibaba. Ito ay hindi lamang isang quadcopter kundi pati na rin isang open-source machine. Ang mga kinakailangang sangkap upang gawin ang quadcopter na ito gamit ang Arduino kasama ang: ESC, Bluetooth , MPU-6050, 330-OHM Risistor, Pinangunahan tagapagpahiwatig, tatanggap, Arduino Nano R3, at pagkonekta ng mga wire.

Mga Koneksyon:
Ang mga koneksyon ng interface na ito ay sumunod bilang;
- Ikonekta ang D3 pin ng Arduino nano sa ESC 1 signal pin.
- Ikonekta ang D9 pin ng Arduino nano sa ESC 3 signal pin.
- Ikonekta ang D10 pin ng Arduino nano sa ESC 2 signal pin.
- Ikonekta ang D11 pin ng Arduino nano sa ESC 4 signal pin.
- Ikonekta ang TX pin ng module ng Bluetooth sa RX pin ng Arduino.
- Ikonekta ang RX pin ng module ng Bluetooth sa TX pin ng Arduino.
- Ang Arduino's A4 pin ay konektado sa SDA pin ng MPU-6050.
- Ang A5 pin ni Arduino ay konektado sa SCL pin ng MPU-6050.
- Ikonekta ang isang terminal ng LED sa D8 pin ng Arduino at ang iba pang terminal sa power supply sa pamamagitan ng isang risistor.
- Ang D2 pin ni Arduino ay konektado sa throttle pin ng tatanggap.
- Ikonekta ang D4 pin ng Arduino sa pin ng ELERON ng tatanggap.
- Ang D5 pin ni Arduino ay konektado sa ailerons pin ng tatanggap.
- Ang D6 pin ni Arduino ay konektado sa rudder pin ng tatanggap.
- Ang D7 pin ni Arduino ay konektado sa aux 1 pin ng tatanggap.
Nagtatrabaho
Ngayon ikonekta ang lahat ng mga bakuran sa mga ground terminal ng Arduino. Kaya kasama nito ang lahat ng mga bakuran ng tatanggap, ang module ng Bluetooth, mga bakuran ng ESC at mga bakuran ng MPU. Pagkatapos nito, magbigay ng koneksyon sa 5V na mapagkukunan ng kapangyarihan sa pamamagitan ng pagkonekta sa GND ng baterya sa GND ng lahat ng mga sangkap. Ang pulang kulay na kawad ay konektado sa Arduino, 5V pin, module ng Bluetooth, at MPU.
Ngayon ang pagbibigay ng board at si Arduino ay handa na upang magdagdag ng code sa pamamagitan ng isang computer. Karaniwan ang Arduino Flight Controller ay gumagana sa ilang mga computer programming. Para doon, kailangan mong i -download muna ang multiwii 2.4, at maaari mong direktang i -download ang code nang direkta.
Ito ay isang napaka-tanyag na software ng FC na ginamit para sa mga multi-rotors sa pamamagitan ng isang malaking komunidad. Dahil ang software na ito ay sumusuporta sa iba't ibang mga multi-copter na may higit na mahusay na mga tampok tulad ng control ng Bluetooth kasama ang iyong smartphone, barometer, OLED display, GPS Position Hold at bumalik sa bahay, magnetometer, LED strips, atbp.
Mapapansin mo kung paano mo ilipat kaagad ang flight controller, ang mga halaga ng data ng accelerometer at gyroscope ay maaaring mapansin sa screen. Kaya ang orientation ng FC ay makikita sa ilalim. Sa interface na ito, maaari mong baguhin ang mga halaga ng signal PID at ayusin ang iyong quadcopter upang pantay -pantay ang iyong personal na kagustuhan. Sa interface na ito, ang mga mode ng paglipad ay maaari ring italaga sa ilang mga posisyon ng switch ng pandiwang pantulong. Ngayon, ang kailangan mo lang gawin ay makahanap ng posisyon para sa iyong Arduino flight controller sa frame na nakatakdang matumbok ang kalangitan.
Ang Arduino Quadcopter ay gumagana sa lahat ng mga kinakailangang sangkap upang lumikha ng thrust sa pamamagitan ng pagpapahintulot sa paglipad at kakayahang magamit. Kaya ang Arduino microcontroller ay gumagana bilang isang flight controller na nakakakuha ng input at nagpapadala ng mga signal sa mga ESC upang makakuha ng ninanais na paggalaw tulad ng pagtaas, pag -hover, pag -on, at pagbagsak.
Sa panimula, ang Arduino quadcopter ay pinagsama ang hardware na may software upang makagawa ng isang lumilipad na makina. Kaya nagsasagawa ito ng iba't ibang mga maniobra depende sa input at feedback ng gumagamit.
Pagkakaiba b/w quadcopter vs drone
Ang pagkakaiba sa pagitan ng isang quadcopter at isang drone ay may kasamang sumusunod.
|
Quadcopter |
Drone |
| Ang isang quadcopter ay isang drone na nakikilala sa pamamagitan ng disenyo ng rotor nito. | Ang drone ay isang pangkalahatang termino para sa anumang UAV o hindi pinangangasiwaan na sasakyan. |
| Ito ay dinisenyo na may apat na rotors o propellers na matatagpuan sa isang magaan na frame. | Saklaw nito ang iba't ibang mga disenyo tulad ng nakapirming pakpak, hybrid VTOL, multirotor, atbp. |
| Ang drone na ito ay maaaring patayo na mag -alis at lupain, at naaanod sa lugar. Ang mga ito ay mas mapaglalangan kumpara sa mga nakapirming pakpak na drone. | Ang drone na ito ay maaaring magkakaiba -iba batay sa disenyo. |
| Ang mga halimbawa ng quadcopter ay: DJI Phantom, DJI Mavic, mas maliit na mga drone ng libangan, atbp. | Ang mga halimbawa nito ay: mga drone ng paghahatid ng serbisyo, pang -aerial photography, inspeksyon sa agrikultura, atbp. |
| Mayroon silang apat na rotors .. | Ang mga drone ay may iba't ibang mga numero (o) naayos na pakpak. |
| Ang mga quadcopter ay karaniwang mas magaan at mas maliit. | Ang mga ito ay mas malaki at mas kumplikado. |
| Ginagamit ang mga ito sa videograpiya, pagkuha ng litrato, paglipad sa libangan, atbp. | Ang mga drone ay naaangkop sa mga sektor ng pang -industriya, komersyal, at militar. |
Mga kalamangan at kawalan
Ang Mga kalamangan sa Quadcopter isama ang sumusunod.
- Marami silang mga benepisyo dahil sa kanilang natatanging disenyo at kakayahan
- Ang mga quadcopter ay may matatag na pagganap.
- Ang mga ito ay maraming nalalaman at simpleng gamitin.
- Mayroon silang kakayahang magamit at pag -access.
- Maaari silang mag -hover at makamit ang mga matatag na flight.
Ang Kakulangan ng Quadcopter isama ang sumusunod.
- Ito ay may limitadong oras ng paglipad at bilis.
- Ang mga ito ay may isang kumplikadong disenyo na may iba't ibang mga bahagi na mahina sa pinsala.
- Nakasalalay sila sa mga de -koryenteng motor dahil sa pangangailangan para sa mga partikular na pagbabago ng throttle, higit sa lahat para sa pag -stabilize.
- Ang mga ito ay hindi gaanong mahusay kung ihahambing sa mga nakapirming pakpak na drone.
- Maaari itong maapektuhan ng mga kondisyon ng panahon.
- Mga Pagsasaalang -alang sa Kaligtasan:
- Ang mga Quadcopter ay maaaring maging hindi matatag dahil sa kanilang disenyo ng multi-rotor, na maaaring humantong sa pag-crash o hindi wastong paglipad.
- Ang bilis ng paglipat ng data nito ay napakabagal.
Mga Aplikasyon
Ang Mga aplikasyon ng Quadcopter isama ang sumusunod.
- Ang mga Quadcopter ay ginagamit sa magkakaibang mga aplikasyon, na kinabibilangan ng pagsasaklaw ng iba't ibang mga industriya at aktibidad.
- Maaari itong magamit sa aerial photography, paghahanap at pagsagip, pagsubaybay, paghahatid, at mga aktibidad sa paglilibang, pati na rin ang akrobatika at karera.
- Maaari rin itong magamit sa agrikultura, inspeksyon sa imprastraktura, pagsubaybay sa kapaligiran, atbp.
- Ang mga Quadcopter ay ginagamit sa mga pang -industriya at komersyal na aplikasyon, na kinabibilangan ng: aerial photography, videography, katumpakan na agrikultura, seguridad, pagsubaybay, serbisyo sa paghahatid, agrikultura na pang -agrikultura, inspeksyon sa imprastraktura, pagsubaybay sa kapaligiran, atbp.
- Ginagamit ito sa mga aplikasyon ng pampublikong sektor tulad ng Public Safety, Search & Rescue, Law Enforcement, Disaster Management, atbp.
Kaya, ito ay Isang pangkalahatang -ideya ng isang quadcopter , ang pagtatrabaho nito, at ang mga aplikasyon nito. Ito ay isang maraming nalalaman UAV (walang sasakyan na sasakyan ng eroplano) na may iba't ibang mga aplikasyon tulad ng videograpiya, paglipad sa libangan, pang-aerial photography, atbp. Narito ang isang katanungan para sa iyo: Ano ang isang UAV?