Ang mga larong 3D, 3D na larawan, at 3D na video ay nagte-trend na teknolohiya ngayon. Para sa pinahusay na karanasan ng end-user na tagagawa ay nagpapakilala ng maraming mga bagong pamamaraan. Ang mga pangunahing pag-andar sa likod ng teknolohiyang 3D ay ang pag-ikot ng pag-ikot, pagtukoy ng oryentasyon, Pagdamdam ng paggalaw, Pagtuklas ng kilos pati na rin ang pagkilala, atbp. Dahil ang sukat ng end na produkto ay napakaliit, ang mga sensor na naka-embed dito ay dapat ding matugunan ang mga kinakailangan sa maliit na sukat. Ang MPU6050 ay dumating bilang isang sagot sa hamon na ito. Dahil ito ay ang pinakamaliit na aparato na may on-chip na pagsasama ng parehong gyroscope at accelerometer. Maaari itong madaling mai-embed sa isang smartphone dahil sa maliit na sukat nito.
Ano ang MPU6050?
Ang MPU6050 ay isang aparato na pagsubaybay sa paggalaw ng 6-axis na nakabatay sa MEMS. Mayroon itong on-chip gyroscope at accelerometer sensor kasama temperatura sensor . Ang MPU6050 ay isang digital na aparato. Ang modyul na ito ay napakaliit ng laki, may mababang mga kinakailangan sa pagkonsumo ng kuryente, lubos na tumpak, may mataas na kakayahang umulit, mataas na pagkabigla ng pagkabigla, mayroon itong programmability na pagganap na partikular sa aplikasyon at mababang mga presyo ng presyo ng consumer. Ang MPU6050 ay madaling ma-interfaced sa iba pang mga sensor tulad ng magnetometers at mga microcontroller.
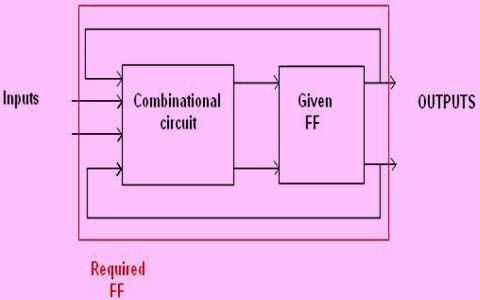
I-block ang Diagram

Block-Diagram-of-MPU6050
Ang module ng MPU6050 ay binubuo ng mga sumusunod na bloke at pag-andar.
- Isang 3-axis MEMS rate gyroscope sensor na may tatlong 16-bit ADC at signal conditioning.
- Isang 3-axis MEMS accelerometer sensor na may tatlong 16-bit ADC at signal conditioning.
- Isang on-chip Digital na galaw ng Processor engine.
- Pangunahing 12C mga digital na interface ng komunikasyon.
- Mga interface ng Auxillary I2C para sa komunikasyon sa mga panlabas na sensor tulad ng Magnetometer.
- Panloob na Clocking.
- Mga rehistro ng data para sa pagtatago ng data ng sensor.
- FIFO memory na makakatulong sa pagbawas ng pagkonsumo ng kuryente.
- Nakagagambala ang nai-program na gagamitin.
- Isang digital sensor ng temperatura ng output.
- Pagsubok sa sarili para sa gyroscope at accelerometer.
- LDO at Bias.
- Charge Pump.
- Mga rehistro ng katayuan.
Diagram ng Circuit
Ang gyroscope na naroroon sa MPU6050 ay maaaring makakita ng pag-ikot tungkol sa tatlong axises X, Y, Z. Ang epekto ng Coriolis ay sanhi ng isang panginginig kapag ang mga gyros ay pinaikot tungkol sa alinman sa mga axes. Ang mga panginginig na ito ay kinuha ng capacitor. Ang signal na ginawa ay pagkatapos ay amplified, demodulated at sinala upang makabuo ng isang boltahe na proporsyonal sa angular rate. Ang boltahe na ito ay na-digitize gamit ang ADC's.
Ang DMP na naroroon sa MPU6050 ay nai-offload ang pagkalkula ng mga algorithm ng paggalaw-ng-galaw mula sa host processor. Nakakakuha ang DMP ng data mula sa lahat ng mga sensor at iniimbak ang na-compute na halaga sa mga rehistro ng data o sa FIFO. Maaaring ma-access ang FIFO sa pamamagitan ng serial interface. Ang paggamit ng AD0 pin na higit sa isang module ng MPU6050 ay maaaring ma-interfaced sa isang microprocessor. Ang MPU6050 ay maaaring magamit nang madali sa Arduino , dahil ang MPU6050 ay mayroong mahusay na dokumentadong mga aklatan na magagamit.
Habang ginagamit sa mga application, ang mga linya ng I2C ng MPU6050 ay hinila ng mataas gamit ang isang 4.7kΩ risistor at ang makagambala na pin ay hinila pababa gamit ang 4.7kΩ risistor. Kapag ang data ay magagamit sa FIFO, ang makagambala na pin ay mataas. Ngayon ay maaaring mabasa ng isang microcontroller ang paggamit ng data Komunikasyon sa I2C bus Ang data na ibinigay ng mga aklatan ay naglalaman ng mga sumusunod na halaga ng data- Mga bahagi ng Quaternion, mga anggulo ng Euler, Yaw, Pitch, Roll, Real-world acceleration, World frame acceleration, at Teapot invent sense sense.
Pin Diagram

Pin-Diagram-ng-MPU-6050
Magagamit ang MPU6050 bilang isang maliit na 4 × 4 × 0.9 mm na pakete. Ang istraktura ng MEMS ay hermetically selyadong at nakabuklod sa antas ng wafer. Magagamit ang MPU6050 bilang isang 24-pin QFN package. Ang paglalarawan ng pin ng modyul na ito ay ibinibigay sa ibaba-
- Ang Pin-1- CLKIN- ay ang opsyonal na panlabas na sanggunian na input ng orasan. Ang pin na ito ay konektado sa lupa kapag hindi ginagamit.
- Ang Pin-2, Pin-3, Pin-4, Pin-5 ay mga NC pin. Ang mga Pin na ito ay hindi konektado sa loob.
- Ang Pin-6, AUX_DA, ay ang I2C master serial data pin. Ginagamit ang pin na ito para sa pagkonekta ng mga panlabas na sensor.
- Ang Pin-7, AUX_CL, ay ang master serial na I2C. Ginagamit ang pin na ito para sa pagkonekta ng mga panlabas na sensor.
- Ang Pin-8, VLOGIC, ay ang digital I / O supply boltahe na pin.
- Ang Pin-9, AD0, ay ang I2C slave address na LSB pin.
- Ang Pin-10, REGOUT, ay ang koneksyon ng capacitor filter capacitor.
- Ang Pin-11, FSYNC, ay ang pag-synchronize ng frame ng digital input. Ang pin na ito ay konektado sa lupa kapag hindi nagamit.
- Ang Pin-12, INT, ay ang nakakagambalang digital output pin.
- Ang Pin-13, VDD, ay ang power supply boltahe na pin.
- Ang Pin-14, Pin-15, Pin-16, Pin-17 ay NC pin. Ang mga pin na ito ay hindi konektado sa loob.
- Ang Pin-18, GND, ay ang ground supply ng kuryente.
- Ang Pin-19 at Pin-21 ang mga RESV na pin. Nakareserba ang mga pin na ito.
- Ang Pin-20, CPOUT, ay ang koneksyon ng pump pump capacitor.
- Ang Pin-22, ay RESV, ang nakareserba na pin.
- Ang Pin-23, SCL, ay ang I2C serial clock.
- Ang Pin-24, SDA, ay ang I2C serial data pin.
Mga pagtutukoy ng MPU6050
Ang MPU6050 ay ang unang mundo na isinama na 6- axis na aparato sa pagsubaybay sa paggalaw. Ang ilan sa mga pagtutukoy ng modyul na ito ay ibinibigay sa ibaba-
- Ang MPU6050 ay mayroong 3-axis gyroscope, 3- axis Accelerometer at isang Digital motion processor na isinama sa isang solong maliit na tilad.
- Gumagana ito sa power supply ng 3V-5V.
- Gumagamit ang MPU6050 ng I2C protocol para sa komunikasyon at paglipat ng data.
- Ang modyul na ito ay may built-in na 16-bit ADC na nagbibigay ng mahusay na kawastuhan.
- Ang MPU6050 ay maaaring ma-interfaced sa iba pang mga aparato ng IIC tulad ng Magnetometers.
- Ang MPU6050 ay mayroon ding built-in na sensor ng temperatura.
- Tinutulungan ito ng I2C sensor bus na mangolekta ng data nang direkta mula sa panlabas na 3-axis compass, na ginagamit nito upang magbigay ng isang kumpletong output ng 9-axis MotionFusion.
- Para sa mga tagagawa, tinatanggal ng MPU6050 ang pangangailangan para sa pagpili, kwalipikasyon at pagsasama sa antas ng system ng mga discrete device.
- Gamit ang port ng I2C, ang mga di-inertial na sensor tulad ng pressure sensor ay maaaring ma-interfaced.
- Ang MPU6050 ay binubuo ng tatlong 16-bits na ADC para sa pag-digitize ng mga gyroscope 0utput at tatlong 16-bit na ADC para sa pag-digitize ng mga output ng accelerometer.
- Ang isang saklaw ng gyroscope na maaaring mai-program ng gumagamit at isang saklaw na bilis ng programmable na gumagamit ay naroroon para sa katumpakan na pagsubaybay ng parehong mabilis at mabagal na paggalaw.
- Ang isang on-chip 1024 byte FIFO buffer ay naroroon na tumutulong sa pagbaba ng pagkonsumo ng kuryente ng module.
- Ang pangangailangan para sa madalas na pooling ng output ng sensor ay nai-minimize sa tulong ng on-chip DMP.
- Ang MPU6050 ay mayroon ding on-chip oscillator na may pagkakaiba-iba ng ± 1%.
- Ang MPU6050 ay may mga low-pass filter para sa gyroscope, accelerometer at temperatura sensor.
- Ginagamit ang sangguniang pin ng VLOGIC upang maitakda ang mga antas ng lohika ng interface ng I2C.
- Ang nasusulat na magagamit na user na saklaw ng gyroscope na nasa MPU6050 ay ± 250, ± 500, ± 1000 at ± 2000 ° / sec.
- Ang pagsasama-sama ng imahe, video, at GPS ay sinusuportahan ng panlabas na pag-sync pin ng gyroscope.
- Ang gyroscope na ito ay napabuti ang pagganap ng ingay ng mababang dalas.
- Ang Gyroscope ay nangangailangan ng 3.6mA ng kasalukuyang para sa pagpapatakbo.
- Ang low pass filter ng gyroscope ay digital na nai-program.
- Ang Accelerometer na naroroon sa MPU6050 ay nagpapatakbo ng 500μA ng kasalukuyang.
- Ang nai-program na buong saklaw na saklaw ng accelerometer na ito ay ± 2g, ± 4g, ± 8g, at 16g.
- Maaari ding makita ng accelerometer ang oryentasyon, i-tap ang pagtuklas.
- Ang mga programmable interrupts ng gumagamit ay naroroon para sa accelerometer.
- Sa pagitan ng mga axes ng accelerometer at gyroscope mayroong isang minimal na sensitibo sa cross-axis.
- Upang makipag-usap sa lahat ng mga pagrehistro 400kHz fast mode I2C ay ginagamit.
- Ang DMP na nasa MPU6050 ay sumusuporta sa pagproseso ng paggalaw ng 3D at mga pagkilala sa kilos na algorithm.
- Ang pagbasa ng pagsabog ay ibinibigay para sa system processor. Matapos basahin ang data mula sa FIFO ang system processor ay papasok sa mababang power mode ng pagtulog habang nangongolekta ng mas maraming data ang MPU.
- Ang mga tampok tulad ng pagkilala sa kilos, pag-pan, pag-zoom, pag-scroll, pagtuklas ng tapikin, at pagtuklas ng shack ay sinusuportahan ng mga nai-program na pagkagambala.
- Ang MPU6050 ay mayroon ding isang opsyonal na panlabas na input ng orasan na 32.768kHz o 19.2Mhz.
Mga aplikasyon ng MPU6050
Ang ilan sa mga aplikasyon ng modyul na ito ay ibinibigay sa ibaba-
- Ang modyul na ito ay ginagamit sa teknolohiya ng Blurfree para sa pagpapatibay ng video o pa rin.
- Para sa pagkilala sa mga kilos na nasa loob ng hangin ang modyul na ito ay ginagamit.
- Sa mga sistema ng seguridad at pagpapatotoo, ang MPU6050 ay ginagamit para sa pagkilala sa kilos.
- Para sa 'walang-ugnay' UI application control at pag-navigate MPU6050 ay ginagamit.
- Sa teknolohiya ng paggalaw ng paggalaw para sa mga paggalaw ng kilos, ginagamit ang modyul na ito.
- Ang modyul na ito ay natagpuan din ang application sa paggalaw na pinagana ang paggalaw at mga application framework.
- Sa InstantGesture -IG, ginagamit ang MPU6050 para sa pagkilala sa kilos.
- Dahil sa kanyang maliit na sukat, ang modyul na ito ay ginagamit sa mga handset at portable gaming kagamitan.
- Ang mga taga-kontrol ng laro na nakabatay sa paggalaw ay mayroon ding modyul na ito.
- Mga 3D na remote control, ginagamit din ng 3D mouse ang modyul na ito.
- Ang mga naisusuot na ginamit para sa kalusugan, fitness at palakasan ay naglalaman din ngMPU6050.
- Ang modyul na ito ay maaari ding matagpuan sa maraming mga laruan.
- Para sa mga pagsukat ng IMU ay ginagamit ang MPU6050.
- Sa mga drone at quadcopter, ang MPU6050 ay ginagamit para sa control ng posisyon.
- Ang modyul na ito ay natagpuan din ang application sa mga self-balancing robot.
- Ang MPU6050 ay lubos na ginustong para sa robotic control sa braso.
- Gumagamit din ang mga robot na humanoid ng modyul na ito para sa pagkiling, pag-ikot, pagtuklas ng oryentasyon.
- Sa mga smartphone, ginagamit ang modyul na ito para sa mga application tulad ng pinalawak na katotohanan, paglalaro, pagkontrol sa utos ng kilos, pagkuha ng panoramic na larawan, at pagtingin.
- Ang modyul na ito ay inilalapat din para sa mga serbisyo na nakabatay sa lokasyon.
Alternatibong IC
Ang ilan sa mga IC na maaaring magamit bilang isang kahalili sa MPU6050 ay ADXL335, ADXL345, MPU9250, MPU6000.
Mas gusto ang modyul na ito para sa mga portable na aparato dahil sa kanyang sukat na sukat at mga system na pinalakas ng baterya dahil sa mababang mga kinakailangang konsumo ng kuryente. Maaaring baguhin ng MPU6050 ang isang handheld mobile sa isang malakas na 3D na intelihente na aparato. Ang mga karagdagang detalye sa mga de-koryenteng katangian at makagambala ng lohika ng modyul na ito ay matatagpuan dito datasheet . Aling sa microprocessor na iyong nakipag-ugnayan sa MPU6050?