Sa modernong mundo, gampanan ng robot ang isang mahalagang papel . Ang pangunahing layunin ng robot ay upang bawasan ang lakas ng tao. Ang mga robot ay ginagamit sa electronics sa maraming mga application. Sa artikulong ito tinalakay natin tungkol sa kung paano bumuo ng isang robot gamit ang Arduino module at 8051 microcontroller. Upang bumuo ng isang robot sa Arduino ipinapaliwanag namin ang tungkol sa robot ng arduino na may pag-iwas sa balakid. Kabilang sa mga kinakailangang sangkap ang Robot body, DC motor, Ultrasonic sensor, Arduino module, Motor driver IC at Arduino Module
Paano Bumuo ng isang Robot?
Ang kinakailangang mga sangkap upang maitayo ang robot ay kasama ang mga sumusunod
Katawan ng Robot
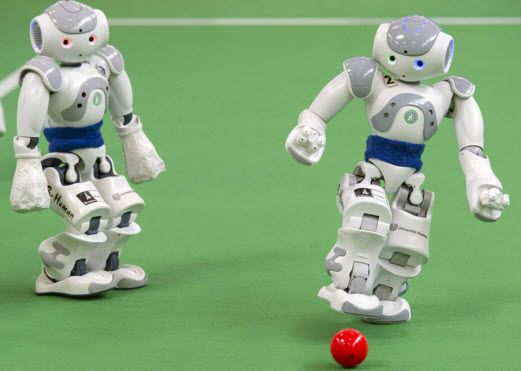
Ang pangunahing katawan ng robot ng ang robot ng pag-iwas sa balakid ay ipinapakita sa sumusunod na imahe. Ang katawan ng robot ay isang plastik na katawan at naglalaman ito ng mga gulong sa magkabilang panig. Sa harap ng katawan ng robot ay nakaayos ang ultrasonic sensor. Sa pamamagitan ng paggamit ng ultrasonic sensor maaaring makita ng balakid. Kapag ang robot ay gumagalaw, kung ang anumang balakid ay napansin ng ultrasonic sensor kung gayon ang robot ay lilipat at ito ay magpapatuloy na gumagalaw.

Katawan ng Robot
DC Motor
Ang Ang DC motor ay isang de-kuryenteng motor at tumatakbo ito sa direktang kasalukuyang kuryente. Ang pagpapatakbo ng anumang de-kuryenteng motor ay batay sa electromagnetism. Ang magnetic field ay ginawa ng kasalukuyang nagdadala konduktor kapag inilagay ito sa isang panlabas na magnetic field, makakaranas ito ng isang puwersa na proporsyonal sa kasalukuyang nasa conductor. Sa pangkalahatan, alam natin na ang mga magnet ay nasa tapat ng pagkahumaling ng polarity mula hilaga hanggang timog at kung ang mga polarity ay pareho tulad ng hilaga hanggang hilaga at timog hanggang timog pagkatapos ang mga magnet ay tataboy.

DC Motor
Ang panloob na pagsasaayos ng DC motor ay idinisenyo upang ikabit ang pakikipag-ugnay ng magnetiko sa pagitan ng kasalukuyang nagdadala na konduktor at panlabas na magnetic field upang makagawa ng paggalaw. Sa ito ay gumagamit kami ng dalawang DC motor, ang bawat motor ay naglalaman ng 6v at ang kabuuang dalawang DC motor ay naglalaman ng 12v. Ang dalawang DC motors ay inilalagay sa katawan ng robot na maaari nating obserbahan sa sumusunod na imahe. Ang katawan ng robot ay inilipat sa tulong ng mga motor ng DC

Katawan ng Robot na may DC Motor
Modyul ng Arduino
Ipinapakita ng sumusunod na imahe ang imaheng module ng arduino. Ang module ng arduino gumaganap ng mahalagang papel sa disenyo ng balakid sa pag-iwas sa robot na gumagamit ng arduino kit. Ang receiver pin ng arduino ay konektado sa pangalawang pin ng ultrasonic sensor at ang ika-1, ika-2, at ika-3 na pin ng arduino module ay konektado sa driver ng DC motor. Ang mga karaniwang bahagi ng capacitor at diode ay konektado din sa arduino module sa tulong ng power supply ng baterya.

Modyul ng Arduino
Motor Driver IC
Upang patakbuhin ang motor na DC ang driver ng motor na IC ginamit na Ang mga pin na 3,6 & 11, 14 ng motor driver ay konektado sa DC motor. Ang input pin na 1 at 2 ay konektado sa module ng arduino at ang paganahin ang pin ay konektado sa transmitter pin ng arduino. Ang mga pin na 4, 5, 12, 13 ng motor driver ay konektado sa lupa.

Motor Driver IC
Ultrasonic Sensor
Sa konseptong ito ang ultrasonic sensor ay ginagamit upang tuklasin ang isang sagabal nang maaga at magpapadala ito ng utos sa arduino board. Nakasalalay sa signal ng pag-input na ini-redirect ng microcontroller ang robot upang ilipat sa mga kahaliling direksyon.

Ultrasonic Sensor
Ang mga aplikasyon ng pag-iwas sa balakid ng robot ng arduino
- Ang robot ng arduino ay maaaring lumipat sa anumang ibabaw
- Maaari itong lumipat sa ibabaw ng metal tulad ng katawan ng ref.
Ipinapakita ng imahe sa ibaba ang arduino robot para sa pag-iwas sa balakid

Arduino Robot para sa Pag-iwas sa Obstacle
Upang bumuo ng isang robot na may ang 8051 microcontroller nagpapaliwanag kami tungkol sa sasakyan ng metal na detektor ng robot. Ang mga sangkap na kinakailangan upang mabuo ang robot na may 8051 microcontroller ay
- 8051 microcontroller
- DC motor
- Mga driver ng motor
- Pang hanap ng bakal
- Decoder
- Encoder
- Itulak ang mga pindutan
- Crystal
- RF transmitter at tatanggap
Pang hanap ng bakal
Ang pang hanap ng bakal ay isang coil mayroon itong isa o higit pang mga metal coil na ginamit upang makita ang mga metal sa lupa. Gumagana ang metal detector sa prinsipyo ng electromagnetic induction. Ang metal detector ay konektado sa katawan ng robot sa pamamagitan ng PCB na maaari nating obserbahan sa huling imahe. Ipinapakita ng sumusunod na imahe ang pangkalahatang metal detector na ginamit sa mga elektronikong proyekto.

Pang hanap ng bakal
Mga Push Button
Ang mga pindutan ng itulak ay mga pindutan na binubuo ng matitigas na metal tulad ng plastik at metal. Pangkalahatan ang mga push button ay ginagamit upang i-reset ang programa sa microcontroller. Ipinapakita ng sumusunod na imahe ang imahe ng pindutan ng push.

Push Button
8051 Microcontroller
Ang Ang 8051 microcontroller ay binubuo ng 40 pin . Ang ika-4 at ika-5 na pin ng microcontroller ay konektado sa oscillator ng kristal. Ang Vcc pin ay ibinibigay sa supply ng kuryente ng 5V at ang ground pin ay konektado sa lupa. Ang mga pin na 15, 16, 18, 19 ng microcontroller ay konektado sa encoder IC ng HT12E. Ang mga microcontroller pin 2, 7, 8, 9, ay konektado sa mga push button.
Ang sumusunod na imahe pagkatapos ng pagkonekta sa lahat ng mga bahagi tulad ng risistor, kapasitor, kristal oscillator, 8051 serye microcontroller, encoder atbp ay nasa ang nakalimbag na circuit board .

Mga Koneksyon sa PCB
Ipinapakita ng imahe sa ibaba ang robot na detektor ng metal na may 8051 serye na microcontroller.

Metal Detector Robot kasama ang 8051 Series Microcontroller
Sa artikulong ito tinalakay natin ang tungkol sa Paano bumuo ng isang robot gamit ang arduino at 8051 Microcontroller . Inaasahan kong sa pamamagitan ng pagbabasa ng artikulong ito nakakuha ka ng ilang pangunahing kaalaman upang makabuo ng isang robot. Kung mayroon kang anumang mga query tungkol sa artikulong ito o tungkol sa electronics at mga proyekto sa komunikasyon , mangyaring huwag mag-atubiling magbigay ng puna sa seksyon sa ibaba. Narito ang tanong para sa iyo, Ano ang isang 8051 series na microcontroller?
.