
Kadalasan, ang mga robot ng remote control ay gumagamit ng mga RF circuit, na mayroong mga drawbacks ng limitadong saklaw ng pagtatrabaho, limitadong kontrol at limitadong saklaw ng dalas. Upang mapagtagumpayan ang mga drawbacks na ito, pinamamahalaan ng cell phone ang land rover ginagamit ang robotic na sasakyan. Nagbibigay ito ng mga pakinabang ng robotic control, mga panghihimasok na libreng Controller at hanggang labindalawang sistema ng pagkontrol, atbp.
Bagaman ang mga kakayahan at hitsura ng naka-embed na robotics magkakaiba-iba, lahat ng mga robot ay nagbabahagi ng mga tampok ng isang palipat-lipat, istrakturang mekanikal sa ilalim ng ilang uri ng kontrol. Ang pagkontrol ng mga robot ay nagsasangkot ng tatlong magkakaibang mga yugto ng kanilang pang-unawa, pagproseso at pagkilos. Karaniwan, ang mga sensor ay naka-mount sa robot. Ang pang-unawa at pagproseso ay ginagawa ng on-board microcontroller, at ang aksyon ay ginaganap gamit ang mga motor.
Pinapatakbo ng Cell Phone Land Rover Robotic Vehicle

Pinapatakbo ng Cell phone Land Rover Robotic Vehicle ng Edgefxkits.com
Ang pangunahing hangarin ng proyektong ito ay upang makontrol ang isang robotic arm na naka-mount sa isang robotic na sasakyan sa pamamagitan ng paggamit ng isang mobile phone. Nagbibigay ito ng isang malaking hanay ng pagtatrabaho at matatag na kontrol atbp.
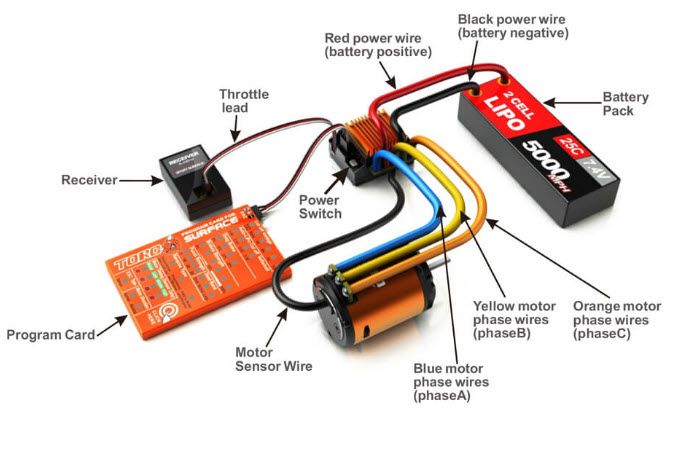
I-block ang Diagram ng Cell Phone na Pinapatakbo ng Land Rover Robotic Vehicle:

I-block ang Diagram ng Pinapatakbo na Land Rover ng Cell phone
Ang pangunahing mga bloke ng gusali ay ang microcontroller, Cellphone, DTMF Decoder at DC-Motor-driver circuit. Ang cellphone ang pinakamahalagang bahagi ng buong system sapagkat ang buong system ay gumagana at pinapagana ng cellphone. DTMF (dalawahang tone multi frequency) natatanggap ang input signal mula sa cell phone at na-decode ito, at pagkatapos ay bumubuo ng 4-bit-digital na output ng 8051 microcontroller . Kapag ang decoder ng DTMF ay nagbibigay ng isang digital na output, bumubuo rin ito ng isang nakakagambala sa bawat oras.
Ang microcontroller ay ang puso ng buong system habang ginagawa nito ang buong pagkilos na pagkontrol. Ang Microcontroller ay nakasalalay sa code na nabuo ng DTMF decoder upang ilipat ang rover pakanan o pakaliwa at pasulong o paatras sa pamamagitan ng pag-ikot ng parehong DC motor. Tumatanggap ang drayber ng DC motor ng mga nagpapagana ng signal mula sa microcontroller sa mga tuntunin ng mababa o mataas na lohika, pagkatapos ay pinalalakas at pinapaikot nito ang dalawang motor sa parehong direksyon.
Ang kontrol ng robot ay nagsasangkot higit sa lahat sa apat na magkakaibang mga yugto: pang-unawa, pagproseso ng pagkilos at pagtuklas. Sa yugto ng pang-unawa kung ang cellphone na naka-attach sa robot ay tumatanggap ng isang tawag, pagkatapos ay ang pagpindot sa pagkilos ng susi sa cellphone ay nababawasan ang nabuong tono ng DTMF. Pagkatapos, ang decoder chip ay tumatanggap ng audio signal mula sa cellphone, at pagkatapos ay pinapalitan ang DTMF tone sa isang binary code, na pagkatapos ay pinakain sa microcontroller. Sa proyektong ito, ang isang MT88710 IC ay ginagamit bilang isang decoder ng DTMF. Sa yugto ng pagproseso, pinoproseso ng microcontroller ang binary code na natanggap mula sa decoder ng DTMF. Ang Ang Microcontroller ay preprogrammed sa 'C' upang maisagawa ang partikular na gawain ayon sa mga input bit.
Sa yugto ng pagkilos, ang pag-ikot ng mga motor ay nakasalalay sa input na ibinigay ng microcontroller. Dalawang DC motor bawat isa sa 30 RPM ay ginagamit para sa landrover at hinihimok ng motor na driver ng IC. Sa pagtuklas ng entablado, at para sa pagtuklas ng balakid, an infrared transmitter at tatanggap ay ginagamit kasama ang buzzer. Kapag ang balakid ay dumating sa harap ng robot, ang IR transmitter ay nagpapadala ng mga IR ray sa bagay, pagkatapos ay ang bagay na sumasalamin ng IR ray sa IR receiver. Tumatanggap ang IR receiver ng mga IR ray upang buhayin ang buzzer.
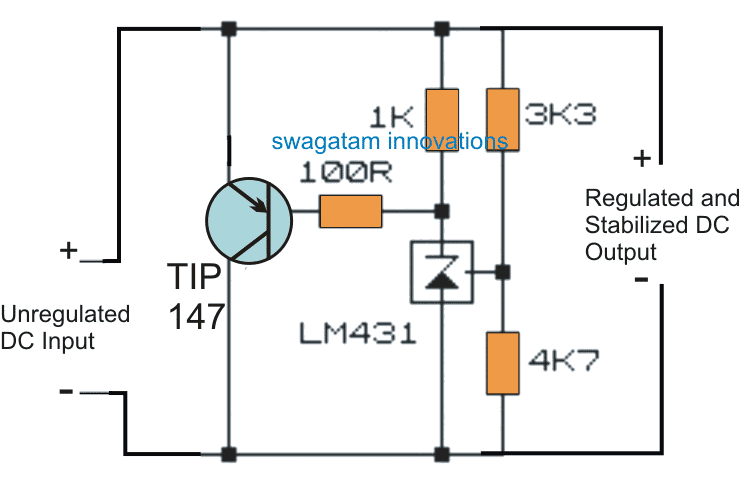
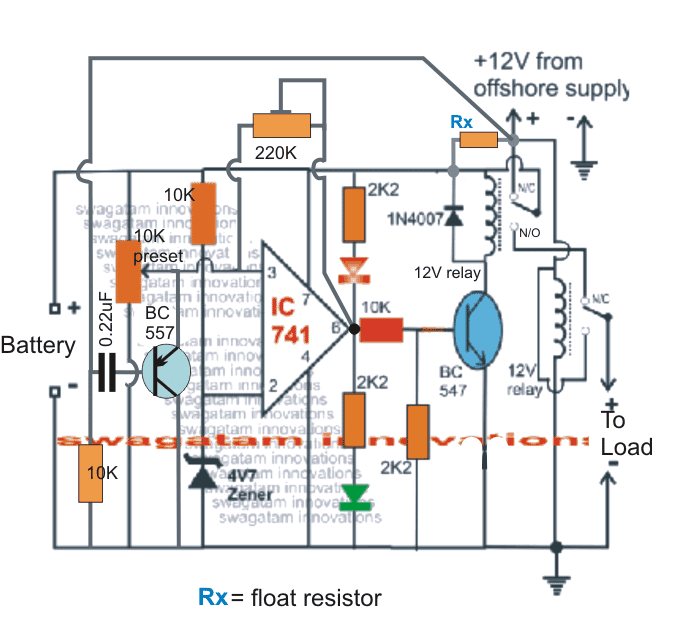
Circuit Diagram ng pinapatakbo ng cell phone na land rover na Robotic Vehicle:
Ang mga pangunahing bahagi ng robotic landrover na pinapatakbo ng cellphone na ito ay ang microcontroller, driver ng motor at decoder ng DTMF. Ang isang MT8870 serye na DTMF decoder ay ginagamit sa proyektong ito na gumagamit ng mga diskarte sa pagbibilang ng digital upang makita ang mga pares ng 16 DTMF na tono sa isang 4-bit na output ng code. Tinatanggal ng built-in na dialtone circuit ang pag-prefilter. Kung ang isang senyas ng pag-input ay ibinigay sa pin2, pagkatapos ay ang pagsasaayos ng input ay kinikilala na epektibo. Ang 4-bit-decode signal ng DTMF tone ay inililipat sa pin11 sa pamamagitan ng output ng pin 14. Ang mga pin na ito ay konektado sa mga microcontroller pin na Pao, Pa1, Pa2 at Pa3. Ang output ng microcontroller mula sa mga port pin PD0 sa pamamagitan ng PD3 at PD7 ay pinakain sa mga input na IN1, IN4 at pinapayagan ang mga pin na EN1, EN2 ng motor-driver na L293D IC na himukin ang dalawang DC motors .

Circuit Diagram ng Pinapatakbo ng Cell phone na Land Rover
Sa circuit na ito, ginagamit ang S1 switch para sa manu-manong pag-reset. Ang output ng microcontroller ay hindi sapat upang himukin ang mga DC motor, kaya kinakailangan ang mga kasalukuyang driver para sa pag-ikot ng motor. Ang driver ng motor na L293D ay idinisenyo upang magbigay ng mga daloy ng bidirectional drive na hanggang sa 600 mA sa mga voltages mula 4.5V hanggang 36V, na ginagawang mas madaling magmaneho ng DC motors. Ang driver ng L293D motor ay binubuo ng apat na mga driver. Ang mga pin na IN1 hanggang IN4 & OUT1 at OUT4 ay ang mga input at output pin ng driver 1 sa pamamagitan ng driver 4. Ang mga driver na 1,2,3 at 4 ay pinagana ng paganahin ang pin1 (EN1) at ang pin 9 (EN2). Kapag ang pag-input ng EN1 (pin1) ay mataas, ang mga driver na 1 at 2 ay pinagana. Katulad nito, ang paganahin ang input EN2 (pin9) ay nagbibigay-daan sa mga driver 3.
Mga Kalamangan at Kalamangan:
Ang mga bentahe ng robotic landrover na pinapatakbo ng cellphone ay may kasamang wireless controling probisyon at surveillance system, 3G-technology-based na pag-navigate sa sasakyan, at walang limitasyong saklaw ng pagpapatakbo batay sa network ng cellphone. Kasama sa kawalan ay: ang gastos habang mataas ang pagsingil ng cellphone paglabas ng mga baterya sa mobile : ang naglalabas na problema na nauugnay sa mga baterya bilang singil ng pagkawala ng baterya dahil sa mabilis na paglabas dahil ang pagkarga ay mataas na kakayahang umangkop: ang sistema ay hindi madaling ibagay sa lahat ng mga cellphone, ngunit ang mga may naka-headset na naka-attach ay maaari lamang magamit.
Kaya, ang proyektong robot na pinamamahalaan ng Cellphone na ito ay napaka kapaki-pakinabang sa mga aplikasyon ng militar upang makontrol ang mga sasakyang militar sa pamamagitan ng paggamit ng isang mobile phone. Sa hinaharap, maaari nating makita ang posisyon ng mga kaaway sa pamamagitan ng pag-aayos ng a wireless camera sa land rover robotic na sasakyan. Ang proyektong ito ay maaari ding maging kapaki-pakinabang sa mga akademiko dahil ang mga mag-aaral ay maaaring matuto ng iba't ibang mga terminolohiya at prinsipyo na iminungkahi sa proyektong ito. Tutulungan ng proyektong ito ang mga mag-aaral na idagdag ang kanilang mga makabagong kaisipan at ideya sa bumuo ng mga proyekto ng robotics .
Mga Kredito sa Larawan:
- Pinapatakbo ng Cell Phone Land Rover ni santoshbanisetty
- Circuit Diagram ng Cell Phone na Pinapatakbo ng Land Rover ni inhinyero



{kind=link}