Ipinapaliwanag ng post ang isang simpleng balakid sa pag-iwas sa robot circuit nang walang microcontroller at nang hindi gumagamit ng mga espesyal na circuit ng driver ng motor o ICs. Ang ideya ay hiniling ni G. Faiyyaz
Ang disenyo
Talaga ito ay nasa anyo ng a gumagalaw na sasakyan na kung saan ay magagawang upang makita at maiwasan ang mga potensyal na mga hadlang sa kanyang landas at baguhin ang direksyon nito nang naaangkop upang ang paggalaw nito ay mananatiling hindi nagagambala, simple!
Sa gayon ang operasyon ay awtomatiko nang walang manual o interbensyon ng tao.
Ang ipinakita na ideya ng isang balakid na pag-iwas sa robot na walang microcontroller tulad ng ipinahihiwatig ng pangalan ay hindi gumagamit ng isang microcontroller at samakatuwid ay napaka-simple upang bumuo at angkop sa anumang bagong hobbyist.
Habang ang pagdidisenyo ng circuit natanto ko na upang maipatupad ang prinsipyo ng hindi bababa sa isang pares ng mga module ng sensor ng hadlang na kinakailangan, sapagkat ang paggamit ng isang solong module ay maaaring maging sanhi ng hindi maayos na paggalaw ng motor at maaaring hindi makakatulong sa isang maayos na pag-iba o pag-ikot ng sasakyan isang libreng landas.
Ang pag-set up ng motor na sasakyan ay halos kapareho ng remote control toy car na tinalakay ko sa isa sa mga naunang post.
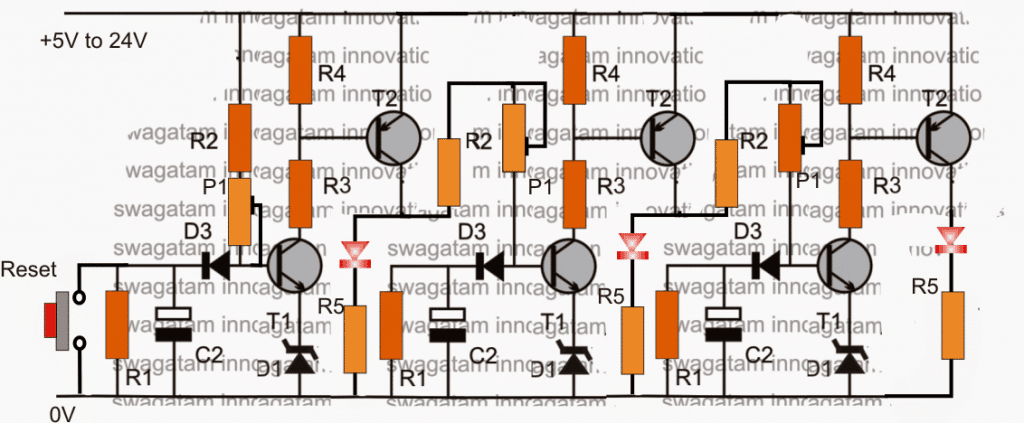
Ang sumusunod na diagram ay kumakatawan sa isa sa mga modyul ng system, at samakatuwid dalawa o isang pares ng mga naturang modyul ay kinakailangan sa buong kanan at kaliwang bahagi ng sasakyan.
Ang ideya ay simple at gumagana nang walang microcontroller at walang mga espesyal na motor ng driver ng IC. Nangangahulugan iyon na maaari mo itong gawin nang walang anumang uri ng pag-coding at nang hindi gumagamit ng anumang uri ng kumplikadong driver ng motor na IC ..... at pinapayagan ka ng circuit na gumamit ng anumang DC motor anuman ang lakas nito, kaya kahit na ang pag-iwas sa mataas na lakas na pag-iwas sa mga sasakyan ay maaaring ginawa gamit ang circuit na ito na karaniwang ginagamit sa mga mall at mga katulad na retail outlet.
Diagram ng Circuit

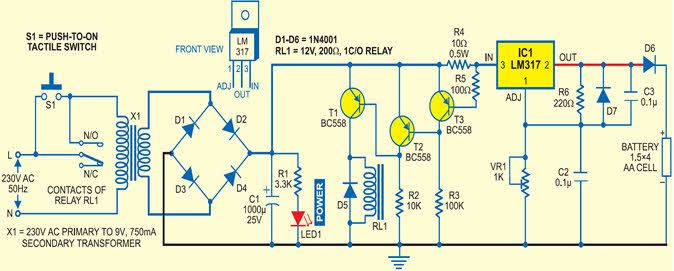
Subukan nating maunawaan ang circuit sa itaas sa tulong ng sumusunod na paliwanag:
Paano ito gumagana
Ang IC 555 ay naka-configure bilang isang IR transmitter at itinakda upang makabuo ng isang pare-pareho na dalas ng 38kHz, habang ang magkadugtong na transistorized circuit ay na-configure bilang yugto ng tatanggap o yugto ng IR sensor.
Ipagpalagay natin na ito ang kanang bahagi ng module, at ipagpalagay na ang modyul na ito ang nangyari na unang makakita ng isang balakid sa daanan.
Samakatuwid sa lalong madaling nakita ang isang balakid, ang dalas ng 38kHz na nabuo ng 555 IC ay makikita sa sensor ng magkadugtong na circuit ng receiver.
Agad na pinapagana ng tatanggap ang mga nauugnay na transistors tulad ng panghuling driver ng transistor ay na-inhibit mula sa pagsasagawa.
Ngayon ang motor na kinokontrol ng transistor na ito ay dapat na matatagpuan sa kaliwang bahagi ng sasakyan, iyon ay nasa kabaligtaran ng modyul na ito ... katulad ng motor na matatagpuan sa kanang bahagi ay talagang kinokontrol ng kaliwang bahagi ng module .
Dahil dito, kapag ang nasa itaas ay ipinapalagay na module ng kanang bahagi ng hadlang ng detektor, ito ay tumitigil sa kaliwang bahagi ng motor, habang ang kanang bahagi ng motor ay pinapayagan na gumalaw nang normal.
Ang sitwasyong ito ay nagreresulta sa sasakyang sapilitang kumuha ng kaliwang bahagi ... na nangangahulugang ngayon ang ipinapalagay na kaliwang module ay nagsisimula nang mas malakas na mga signal ng balakid at patuloy na pinipilit ang sasakyan na magpatuloy nang mas mahirap sa nagpapatuloy na paglihis hanggang sa ganap na maiwasan ang balakid . Huminto na ang module sa pagtanggap ng mga signal ng balakid at ang sasakyan ay nagsisimulang gumalaw nang normal sa bago nitong landas.
Habang ang pag-iba sa itaas ay isinasagawa ang kaliwang bahagi ng module ay pinilit na maging mas at mas maraming ihiwalay at malayo sa balakid upang hindi ito makakuha ng isang pagkakataon upang makagambala sa pamamaraan, at payagan ang isang malinis at makinis na pag-ikot ng sasakyan.
Eksakto ang parehong mga pamamaraan ay ipinatupad kung sakaling ang kaliwang bahagi ng module ay mangyari upang maunawaan ang balakid nang maaga sa kanang bahagi ng module, kung saan ang sasakyan ay pinilit na ilipat ang mas mahirap at mahirap patungo sa kanang bahagi.
Maaari rin naming makita ang isang 'hindi pagpapagana' circuit yugto sa module na kung saan ay magkakaugnay sa kabuuan ng kaliwa at kanang mga module ng gilid. Ang yugtong ito ay sadyang ipinakilala upang matiyak na ang parehong mga module ay hindi kailanman ginawang aktibo nang magkasama.
Samakatuwid halimbawa kung ang kaliwang bahagi ng module ay naging una upang makakita ng isang balakid, agad na hindi pinapagana nito ang kanang bahagi ng module at pinasimulan ang paglihis ng sasakyan sa kanan at kabaligtaran.
Ang sensor IC ay maaaring isang karaniwang serye ng TSOP17XX
Para sa karagdagang impormasyon tungkol sa sensor sa itaas ng IC maaari mong malaman kung paano ikonekta ang TSOP1738 IC
At ang motor ay dapat na nilagyan ng mga kahon ng gear upang ang kilusan ay orihinal na mapanatili sa isang kontroladong antas.
Pag-set up ng Gulong
Ang kumpletong pag-set up ng kaliwa at kanang module at ang nauugnay na mga koneksyon sa kuryente ay maaaring masaksihan sa figure sa ibaba:

Update
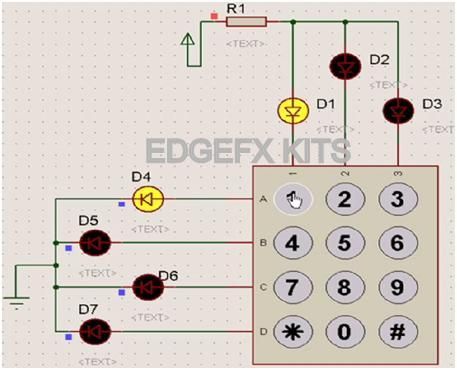
Sinasabi sa amin ng isang maliit na pag-iisip na ang simpleng simpleng balakid sa pag-iwas sa robot circuit ay maaari ding ipatupad sa pamamagitan ng paggamit ng isang solong module, sa halip na ang dalawa.
Gayunpaman, papayagan ng isang solong module ang sasakyan na magsagawa ng isang panig na lihis sa tuwing nakakakita ito ng isang balakid, samakatuwid ang sistema ay maaaring mai-configure alinman upang kumuha ng isang paikot na paglilipat o anticlockwise na paglilipat depende sa kung aling motor ang nakakonekta sa circuit para sa mga aksyon.
Ang halimbawa ng pag-set up ay maaaring mailarawan sa sumusunod na imahe:

Gayunpaman, tila mayroong isang problema sa itaas na solong pag-set up ng motor. Kung ipagpalagay na ang sasakyan ay nakatagpo ng isang kanang anggulo na sulok sa kaliwang bahagi. Pipilitin nito ang sasakyan na panatilihin ang paglipat ng anticlockwise, hanggang sa tumagal ng U-turn, at magsimulang gumalaw pabalik sa parehong direksyon mula sa kung saan ito nagsimula. Hindi ito isang bagay na pahalagahan ng gumagamit.
Nakaraan: SMD Resistors - Panimula at Paggawa Susunod: Paano Gumagana ang isang Accelerometer